
在日本,已经使用移动测绘系统和地面激光扫描仪测量并积累了大量的点云数据(空间中的一组数据点),用于公共工程。然而,大量数据在未处理和非结构化状态下的使用有限。幸运的是,它可以通过使用显示建筑对象完整几何图形的“竣工图”自动提取特征来构造。
今年早些时候,由日本Hosei大学的今井龙一教授领导的日本研究人员提出了另一种使用高精度3D(HD)地图数据提取道路特征的方法。然而,其方法的适用性仅限于道路地图的开发路段。虽然基于深度学习的识别可以解决这个问题,但它们需要大量人工准备的高质量训练数据。
最近,今井教授及其合作者,大阪经济大学的中村健二、濑户南大学的津田吉信、动态地图平台的麻生诺里子和西井大学的山本晋子,开发了一种算法来自动生成训练数据,并从自动从高清地图中提取的点云数据构建了道路特征识别模型。
今井教授解释道:“目前,人们需要目视检查点云数据来识别道路特征,因为计算机无法识别这些特征。但通过我们提出的方法,特征提取可以自动完成,包括未开发道路地图路段的特征。”。他们的工作于2022年11月29日在第12届软计算和智能系统联合国际会议和第23届高级智能系统国际研讨会上发表。
在他们的研究中,研究人员首先使用CloudCompare软件从点云数据中分离出地面。接下来,他们从HD地图生成区域数据,并提取特征的组成点。虽然这些点被指定为道路标志或交通灯,但为剩余数据提供了其他标签。
然后,扩展与组成点相对应的区域数据以生成训练数据。利用这一点,研究人员进一步生成了点云投影图像。最后,他们使用训练数据使用YOLOv3对象检测算法构建识别模型。该模型可以基于聚类点来检测道路特征,而不是使用CloudCompare识别的地面特征。
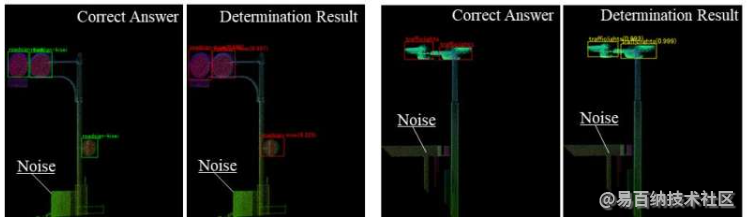
在建立了计算框架后,研究人员在静冈县的一条道路上进行了示范实验,该道路上有65个路标、46个交通灯和1.5公里的噪音特征。他们使用了258个路标和168个红绿灯来训练他们的识别模型,并分别使用了36张和24张图像来计算算法的确定精度。
研究人员发现,路标的准确度、召回率和F值分别为0.84、0.75和0.79,红绿灯的准确度为1.00、0.75和0.86,表明没有错误判断。所提出的模型的精度高于现有模型。
今井教授最后强调了这项工作的未来意义。“从点云数据构建的产品模型将使城市空间的数字孪生环境得以实现,并定期更新道路地图。这对于管理和减少道路检查期间的交通限制和道路封闭是不可或缺的。该技术有望降低人们在日常生活中使用道路、城市和其他基础设施的时间成本。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:通过深度学习实现道路特征的自动检测 https://www.yhzz.com.cn/a/9502.html