
由KAIST机械工程系Hwangbo Jemin教授领导的研究小组开发了一种四足机器人控制技术,即使在沙滩等可变形的地形中也能敏捷地行走。
黄波教授的研究团队开发了一种技术,可以模拟行走机器人在由沙子等颗粒材料制成的地面上接收的力,并通过四足机器人进行模拟。此外,该团队还研究了一种人工神经网络结构,该结构能够在行走的同时做出实时决策以适应各种类型的地面,而无需事先信息,并将其应用于强化学习。
经过训练的神经网络控制器有望通过证明四足行走机器人在不断变化的地形中的鲁棒性来扩大其范围,包括即使在沙滩上也能高速移动的能力,以及在气垫等柔软地面上行走和转动而不会失去平衡的能力。
这项研究由KAIST机械工程系的博士生So-Young Choi作为第一作者,于一月份发表在Science Robotics上,题为“在可变形地形上学习四足运动”。
强化学习是一种人工智能学习方法,用于创建一台机器,该机器收集任意情况下各种动作结果的数据,并利用该数据集来执行任务。由于强化学习所需的数据量如此之大,因此广泛使用了一种通过模拟来收集数据的方法,该方法近似于真实环境中的物理现象。
特别是步行机器人领域基于学习的控制器,通过模拟中收集的数据学习后,已经应用于真实环境,以在各种地形中成功执行步行控制。
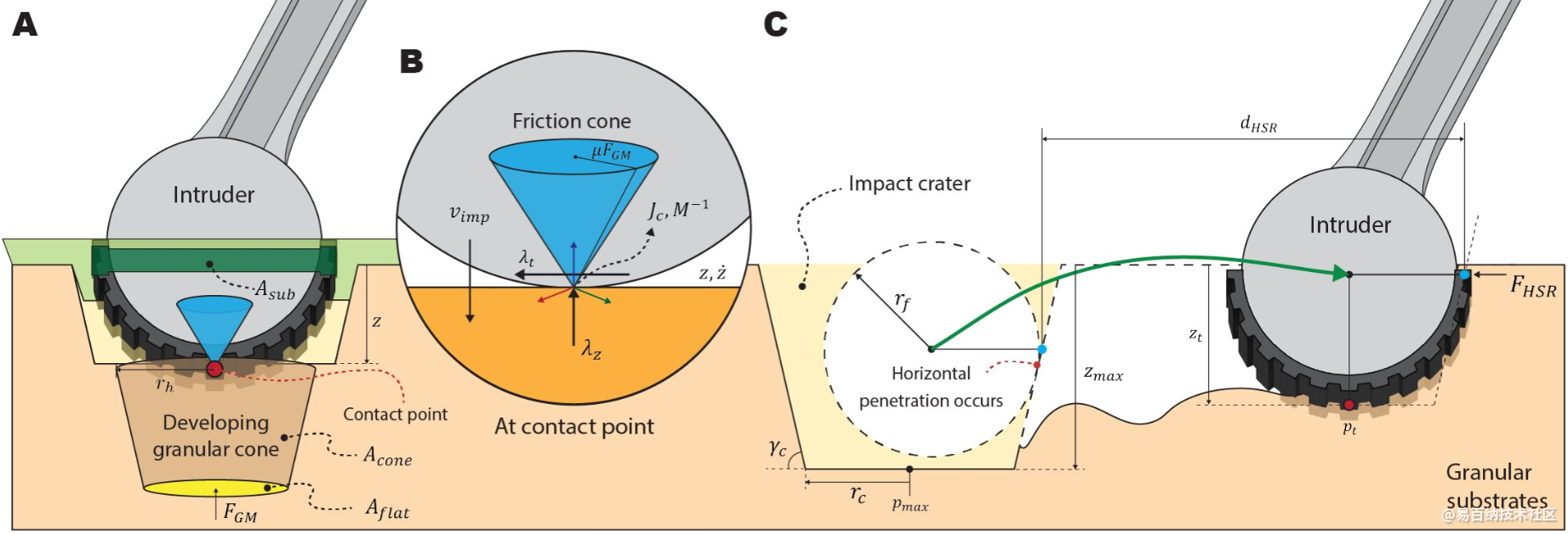
(A)地形模型根据入侵者的穿透深度和速度预测搁浅反作用力的垂直分量。该计算涉及入侵者下方发展中的颗粒锥体,正如Aguilar等人(27)所提出的那样。(B)入侵者与相邻基板之间的表面接触近似为最深处的点接触。假设来自基板的体积切向力为库仑摩 擦。(C)引入水平行程阻力模型,模拟入侵者在基板中水平移动时来自基板的反应。力是根据行程距离dHSR和电流穿透深度zt计算的。
但是,当实际环境与学习的仿真环境存在任何差异时,基于学习的控制器的性能会迅速下降,因此在数据收集阶段实现与真实环境类似的环境非常重要。因此,为了创建能够在变形地形中保持平衡的基于学习的控制器,模拟器必须提供类似的接触体验。
研究小组定义了一个接触模型,该模型基于地面反作用力模型预测步行体运动动力学接触时产生的力,该模型考虑了先前研究中定义的颗粒介质的额外质量效应。

此外,通过计算每个时间步的一个或多个接触产生的力,有效地模拟了变形地形。
研究小组还引入了一种人工神经网络结构,该结构通过使用循环神经网络来隐式预测地面特征,该网络分析来自机器人传感器的时间序列数据。
学习的控制器安装在机器人RaiBo上,该机器人由研究团队建造,在沙滩上显示高达3.03米/秒的高速行走,机器人的脚完全淹没在沙子中。即使应用于更坚硬的地面,如草地和跑道,RaiBo也能够通过适应地面的特性来稳定运行,而无需对控制算法进行任何额外的编程或修改。
此外,它在气垫上以1.54 rad/s(约每秒90°)的速度稳定旋转,即使在地形突然变 软的情况下也表现出这种快速适应性。
研究团队通过与假设地面为刚性的控制器进行比较,证明了在学习过程中提供合适的接触体验的重要性,并证明了所提出的循环神经网络根据地面特性修改了控制器的行走方法。
研究团队开发的模拟和学习方法有望为机器人执行实际任务做出贡献,因为它扩大了各种步行机器人可以操作的地形范围。
第一作者Suyoung Choi说:“已经表明,提供基于学习的控制器与真实变形地面的密切接触体验对于应用于变形地形至关重要。他接着补充说:“所提出的控制器可以在没有地形事先信息的情况下使用,因此它可以应用于各种机器人行走研究。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:一种多功能的机器狗,以每秒3米的速度穿过沙滩-机器狗有什么 https://www.yhzz.com.cn/a/9316.html