由张拉结构构建的仿生连续体机器人
基于独立关节的传统机器人在复杂的现实世界任务中并不总是表现良好,特别是那些涉及灵巧操纵物体的任务。因此,一些机器人专家一直在尝试设计连续体机器人,这种机器人平台的特点是无限的自由度,没有固定数量的关节。
连续体机器人通常基于电缆或其他可变形组件,这些组件可以更自由地移动,并且不受固定关节结构的限制。尽管有这些优势,但提出的许多连续体机器人设计仍然无法有效地导航复杂和非结构化的环境。
中山大学、大连理工大学和伦敦南岸大学的研究人员最近开发了一种受大象躯干启发的新型连续体机器人。该机器人在Soft Robotics上发表的一篇论文中介绍,具有可定制的设计,可以针对不同的应用进行定制。
“我们发现现有的电缆驱动的连续体机器人在变形后总是表现出圆形轮廓,这可能会阻碍它们与变化曲率环境的相互作用,”进行这项研究的研究人员之一吴佳宁告诉Tech Xplore。“为了克服这一限制,我们试图提出一种连续的机器人范式,以适应具有不同曲率的应用场景。
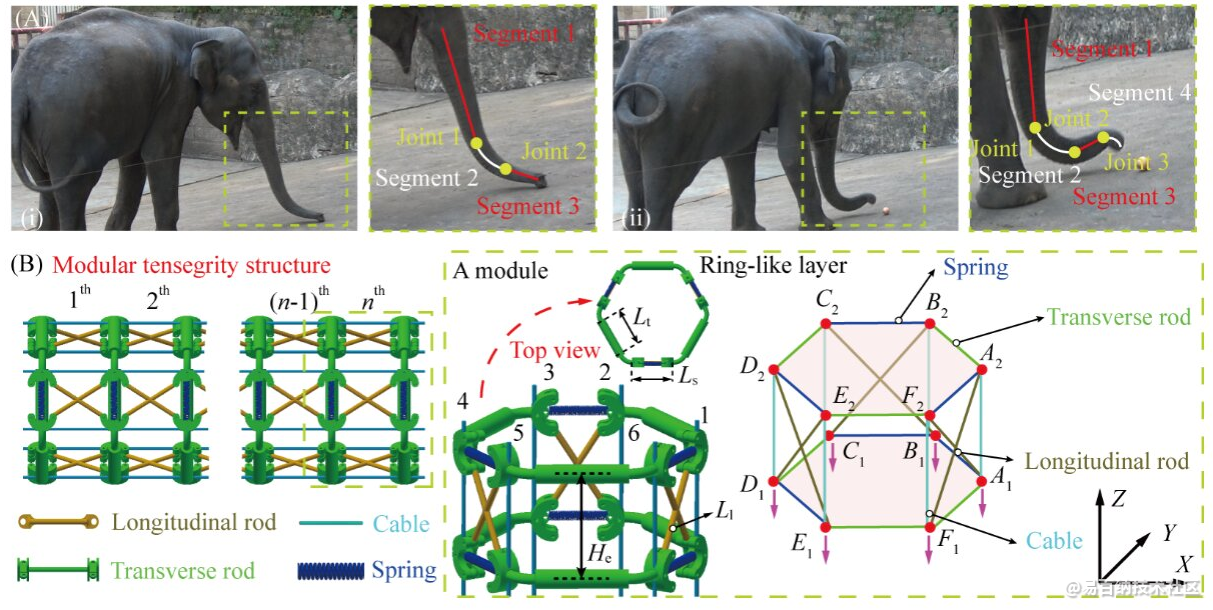
象鼻自然地分为由伪关节连接的有限部分。这使得大象能够更有效地与非结构化环境互动,例如灵活地将它们的躯干挤压到狭窄的空间或到达更高的树枝。
由于其独特的构象,象鼻不同部分的刚度可以独立调节和调整,以不同的方式弯曲。这最终使大象能够调整其鼻子的形状,以处理不同的任务并到达具有各种形状的物体。
配备红外摄像头的连续体机器人,用于检测内部环境昏暗的管道
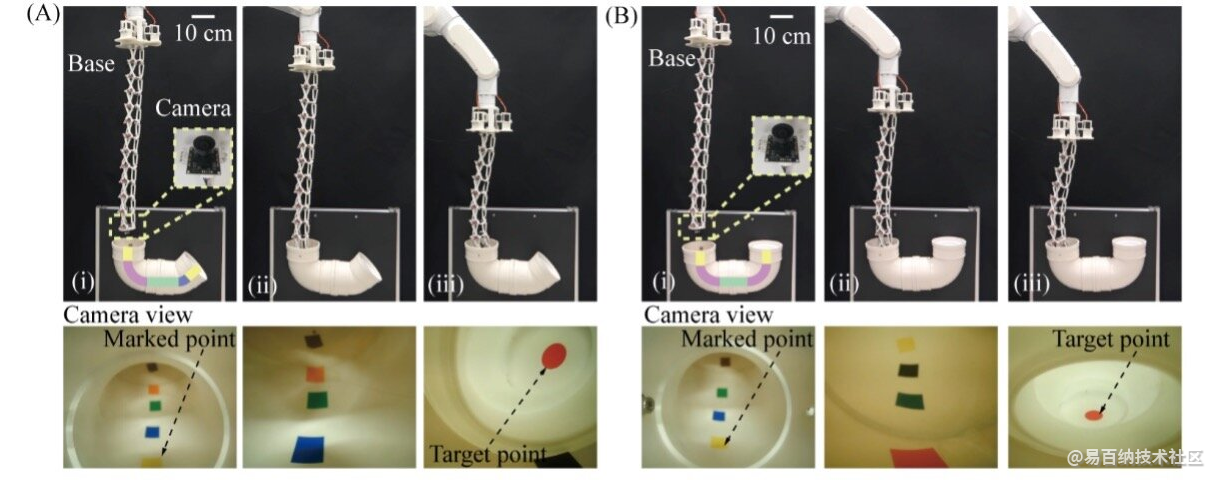
“受到象鼻运动的启发,我们提出了一个具有预编程刚度分布的连续体机器人,以解决我们试图解决的机器人问题,”该研究的另一位研究员彭海军解释说。“通过调节刚度分布,我们的仿生机器人不仅展示了各种变形模式,而且还能够在不同曲率的管道中移动。
由Wu和他的同事创造的受象鼻启发的机器人基于由几个弹性元件组成的3级张拉结构,这些弹性元件均匀分布在整个结构中。这使得研究人员可以通过用具有不同刚度大小的其他弹性元件替换弹性元件来编程机器人的局部刚度特性。
“受益于刚度分布的差异,连续体机器人在相同的驱动标准下表现出不同的机器人配置,”Wu说。“我们的仿生连续体机器人不仅能够与变化曲率环境进行保形交互,而且通过利用固有的智能简化了所需驱动和控制系统的复杂性。
到目前为止,研究人员已经使用他们的设计创建了一个由12个弹性模块组成的原型机器人。然后,他们在一系列试验中展示了其变形能力,重点关注不同的现实世界场景。
“长期和永无止境的进化导致动物表现出惊人的能力,”吴说。“如果我们完全谨慎地观察它们,我们可能会为未来的机器人系统收集一系列受生物启发的设计范式。例如,受象鼻交互行为的启发,我们可以提出一种更灵活的连续体机器人,以满足变化曲率环境中的交互要求。
未来,由这组研究人员创建的连续体机器人可以帮助在非结构化环境中自动化更多现实世界的任务,这些任务使用具有刚性关节结构的机器人很难或不可能解决。由于其独特的设计,机器人还可以通过安装不同的末端执行器(如夹具和传感器)同时支持不同的功能。
“我们现在想开发刚度调节的智能策略,通过这些策略,可以进一步增强连续体机器人在实时探索不可预测的场景方面的能力,”Wu补充道。“例如,一些先进的材料将用于制造弹簧元件,例如形状记忆合金(SMA)和介电弹性体(DE)。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:受象鼻启发的连续体机器人-象鼻的力量 https://www.yhzz.com.cn/a/9314.html