蝙蝠具有在黑暗中四处走动的天生能力,即使它们无法在视觉上感知周围环境。这种迷人的能力基于它们发射的超声波啁啾,产生独特的回波模式,提供有关附近感兴趣物体或障碍物位置的信息。
开发具有类似基于声音的定位能力的机器人可能具有显着的优势,因为它可以减少它们对复杂且昂贵的传感系统(例如,摄像头,激光雷达等)的依赖。这可以降低这些机器人的生产成本,最终促进它们的大规模部署。
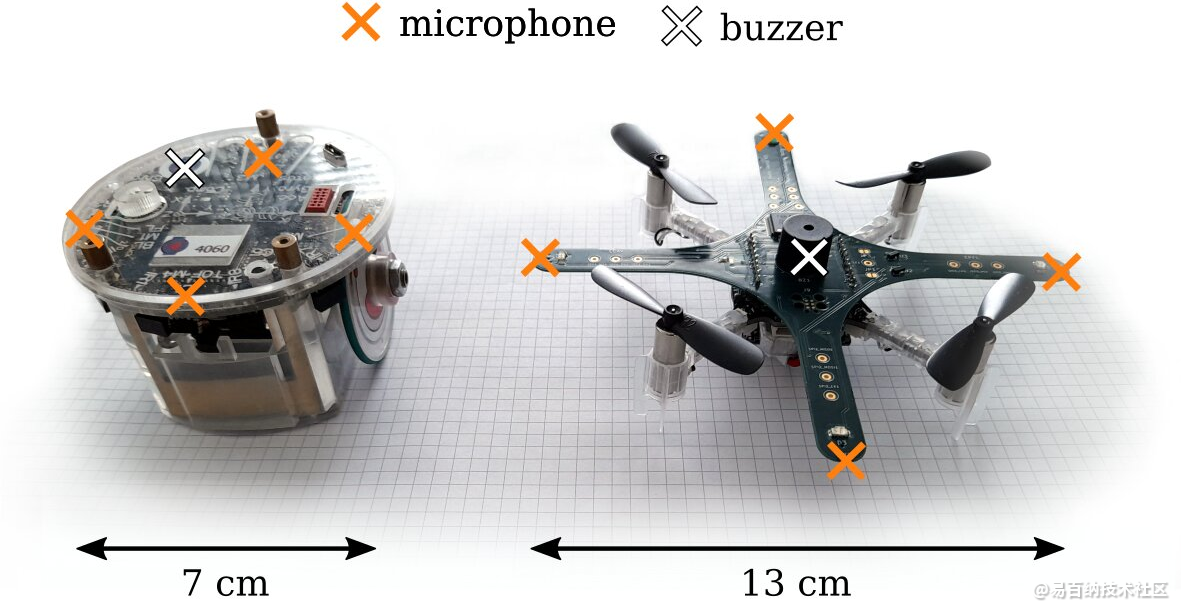
洛桑联邦理工学院的研究人员最近创建了一个新框架,可以在无人机(UAV)中实现基于声音的定位和映射,通常称为无人机。这个框架在IEEE Robotics and Automation Letters上发表的一篇论文中介绍,仅依赖于使用简单的蜂鸣器和低成本麦克风。

“麦克风已经被添加到许多机器人中用于其他任务,特别是用于与人类的交流,因此利用它们进行导航不需要额外的硬件成本。我们乐观地认为,基于蝙蝠的能力,这是可能的:这些动物在夜间和洞 穴中导航,主要使用声音,性能惊人。
虽然之前的一些研究试图使用超声波实现无传感器定位,类似于蝙蝠发出的超声波,但Dümbgen和她的同事着手创建一个仅依靠可听声音的定位和映射系统。这种方法可以显着降低机器人的制造成本和重量,因为机器人上通常已经有蜂鸣器和麦克风。
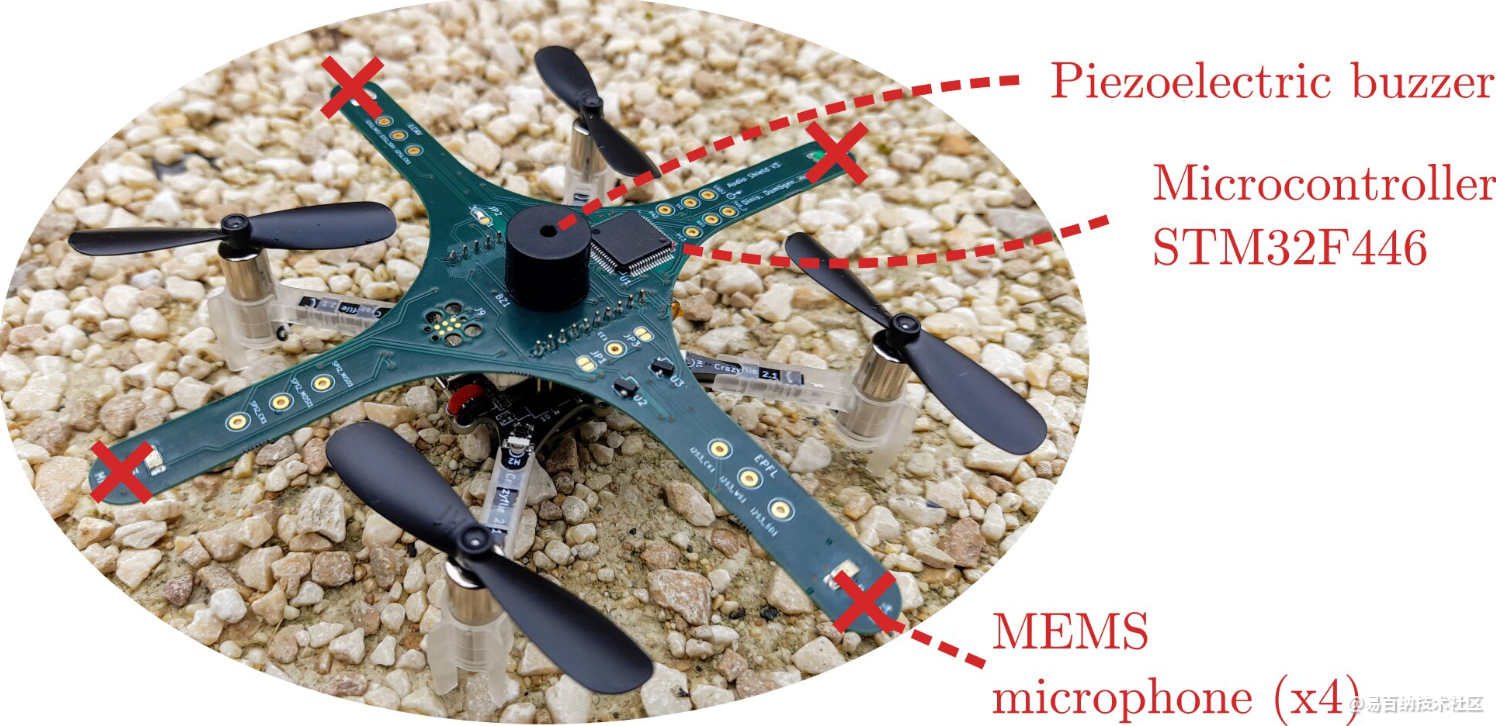
“在设计新的基于音频的导航算法时,我们考虑了这些因素,因为我们希望它们能够在任何至少有一个麦克风和扬声器的平台上有效运行,”Dümbgen解释说。“特别是,我们在只有廉价MEMS麦克风和蜂鸣器的平台上展示了我们的算法,而不是昂贵的测量麦克风和扬声器。
这种工作方式是机器人通过一系列板载蜂鸣器发出频率扫描,然后使用这些扫描在机载麦克风中触发的响应来检测周围环境中的墙壁。
“如果周围有像墙壁这样的强反射器,声音就会被反射,反射的声音会与每个麦克风上的直接声音相互作用,”Dümbgen说。“根据距离和频率,这两个信号要么相互衰减,要么相互放大。因此,通过观察麦克风信号在发射频率上的响度,我们可以确定附近是否有反射器以及它的距离。
使用多个麦克风和在后续位置收集的测量值,该团队的系统还可以确定反射器相对于机器人的角度。
与以前提出的方法相比,这种基于声音的定位和映射系统的主要优势在于它不需要特别复杂的麦克风和扬声器。
这是因为它利用音频干扰,而不是飞行时间数据。这使其能够生成更长的信号,即使在使用廉价的硬件组件时也能实现良好的信噪比,并且无需精确控制所收集测量的时序。

“通过探索Crazyflie无人机上的回声定位,我们确定了为无人机开发的强大的回声定位算法需要应对的主要挑战 – 即运动不确定性和不断变化的螺旋桨噪音,”Dümbgen说。
“我们希望这些结果可以为后续研究提供一个良好的起点,以不断推动机器人回声定位的极限。为此,我们开源了完整的软件和硬件堆栈,以降低有兴趣探索机器人空间导航音频模式的机器人专家的入门门槛。
未来,这组研究人员创建的系统可用于制造低成本和轻量级的机器人,这些机器人可以使用声音在环境中导航,而无需使用相机等先进传感器。一个有趣的研究方向是创建一个新系统,该系统使用无人机自身的螺旋桨噪声来实现回声定位,而不是主动声源。
“由于无人机通常会发出很大的噪音,这将把这种滋扰因素变成一种功能,”Dümbgen补充道。“其他可以探索的研究方向包括将基于声音的算法与其他感官(如视觉)合并,并根据环境在不同的操作模式之间切换。聪明的物种非常擅长这项任务:例如,我们作为人类在黑暗时更多地依赖我们的耳朵,在嘈杂时更多地依赖我们的眼睛。我相信真正的智能机器人也应该具备这种能力。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:一个受蝙蝠启发的框架,为机器人配备基于声音的定位和映射功能-受蝙蝠启发发明了什么 https://www.yhzz.com.cn/a/9202.html