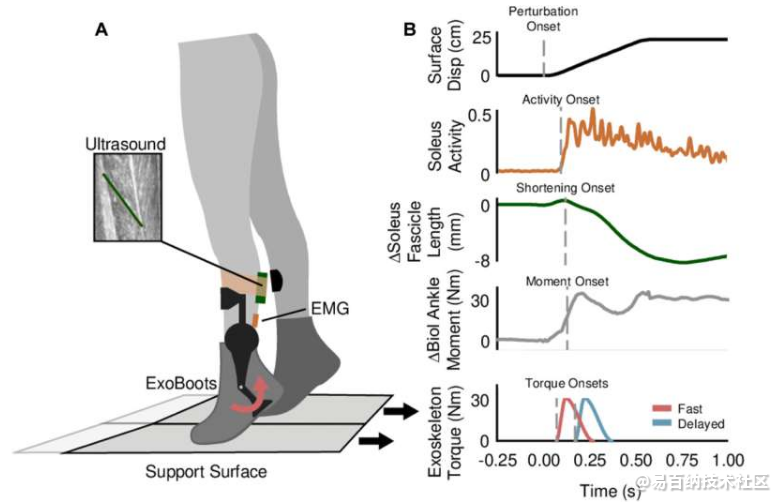
平衡扰动和神经力学测量。(A)描述具有人工快速ExoBoot扭矩(红色),表面肌电图电极(橙色)和B型超声探头(绿色)的向后支撑表面平移。(B)从上到下:理论支撑面位移,相应的处理比目鱼肌活动,比目鱼肌束长度的变化,生物踝关节力矩的变化(灰色),以及人工快速(红色)和生理延迟(蓝色)外骨骼扭矩花键。垂直虚线表示指示参数的起始点
可穿戴机器人有望帮助老年人保持行动能力,帮助截瘫患者恢复行动能力。它们可以帮助人类变得更强壮、更快。但是,到目前为止,它们并不能很好地防止人们摔倒。
人类的平衡是一种复杂的舞蹈,即使是最先进的机器人和可穿戴设备,如机器人外骨骼,也难以复制我们的大脑和身体如何协同工作以保持直立。佐治亚理工学院和埃默里大学的研究人员进行的一项新研究为解决平衡问题迈出了第一步。
在2月15日发表在《科学机器人》杂志上的一篇论文中,该小组表明,脚踝外骨骼必须比我们的身体反应更快,才能改善平衡。当外骨骼延迟施加能量,直到腿部和脚踝的肌肉同时被激活以恢复平衡时,参与者的恢复速度没有加快。
“令人惊讶的是,使用外骨骼的生理延迟辅助完全没有帮助,”乔治亚理工大学博士后、现为东北大学助理教授的Max Shepherd说。“我对结果感到惊讶。我觉得这是一个非常迷人的结果。”
该团队使用了一双德菲股份有限公司(Dephy Inc.)的商用脚踝外骨骼靴子进行研究。参与者穿上靴子,站在埃默里大学Lena Ting神经力学实验室的定制平台上。
研究人员突然移动了平台,他们称之为扰动,导致受试者失去平衡并恢复。他们测试了三种情况:没有外骨骼辅助,辅助延迟以符合身体的自然反应,辅助速度快于生理反应。他们报告说,在身体自然反应之前提供脚踝外骨骼扭矩,使受试者能够承受9%的更大扰动,而无需采取任何步骤;延迟扭矩没有显示出任何改善。
佐治亚理工大学和埃默里分校华莱士·H·库尔特生物医学工程系的教授兼麦卡米什基金会杰出主席廷表示:“很多假肢或外骨骼都是由人体佩戴者发出的生理信号驱动的,无论是肌肉活动还是大脑活动。”。“你测量脚踝周围的肌肉,每当它开始时,你就打开exo。这里的意思是,这不会对平衡起作用。”
正如合著者格雷格·萨维奇(Greg Sawicki)所说,这些发现对这类机器人工具“有点颠覆”。
“主要的控制方法是窃取人类的反应,然后再叠加上去。我们在这项研究中表明,这肯定不够好,至少对于站立平衡来说是这样的,”乔治·w·伍德拉夫机械工程学院和生物科学学院的副教授萨维奇说。
谢泼德说,不能简单地跟随身体自身的反应来驱动外骨骼的激活,这使得创造一种可以帮助人们在现实世界中恢复平衡的设备变得更加困难。但它也为研究人员提供了令人兴奋的研究途径,包括使用机器学习方法来检测和响应扰动。
身体对失去平衡的反应只需要150毫秒左右,所以如果脚踝外骨骼要超过生理反应,它们的激活窗口非常小。在他们的实验中,研究小组使用了类似于智能手机上的加速度计来跟踪脚在扰动期间的加速度,并触发外靴的激活。
注入某种形式的机器学习的更智能的控制器最终可能是有希望的。但是,有趣的是,为这些算法提供数据可能需要远远超出脚踝。
研究人员报告说,来自外骨骼的人工快速辅助破坏了脚踝的初始运动,即使无论靴子是否激活,肌肉活动都是一致的。事实上,脚踝处的局部信号会导致外骨骼在错误的方向上提供扭矩,这会更加不稳定。
该团队表示,这支持了这样一种观点,即肌肉不仅由脚踝的局部感觉信息驱动,而且由来自全身的信息驱动。
Ting说,近50年前的研究表明,全球生理信号在预测身体的平衡纠正行为方面比仅来自脚踝和腿部的局部信息更好。但这些研究还没有以这种方式进行测试。
“这个想法是,你的重心(基本上是整个身体的净运动)驱动着脚踝肌肉需要做的事情,”婷说,她也是埃默里康复医学系的教授。“我喜欢我们的研究结果是,它们使20世纪70年代的故事现代化,并以非常清晰和适用的术语展示了它。我喜欢这个exo现在可能是我们实验室的一个实验设备,可以实际演示当本地信号与全球信号冲突时使用哪种信号。”
除了Ting,Sawicki和Shepherd之外,该研究的作者还包括Sawicki实验室的博士后研究员,现在是德克萨斯大学奥斯汀分校的助理教授Owen Beck;埃默里研究工程师里什·拉斯托吉;博士后乔瓦尼·马蒂诺(Giovanni Martino),他即将成为意大利帕多瓦大学的助理教授。
“有一件事非常特别,那就是我们能够提出一个关于外骨骼和人类之间相互作用的非常具体的问题,并更多地了解外骨骼如何帮助或破坏人类的生理反应,”谢泼德说。“这项研究是一种非常干净的方式,可以提供改善平衡的见解,这可能成为外骨骼中一个非常非常大的子领域。
为了完善他们的理解,该团队使用动作捕捉技术,并将参与者与肌电图(EMG)和超声波传感器连接起来,这样他们不仅可以详细跟踪脚踝和外靴如何协同工作或相互对抗,还可以跟踪肌肉如何发射和强度。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:为了帮助恢复平衡,机器人外骨骼必须比人类的反射更快-助力机器人体外骨骼 https://www.yhzz.com.cn/a/9186.html