有一个想法, 就是把一些电影中的镜头, 拿出来, 作为某些自动设备输入源, 这样就可以使用广阔的资源, 来做硬件的内容提供者了…
先说一下环境, py37, media pipe, tf是cpu的版本, 因为我实在不知道怎么平衡torch跟tf, 因为media pipe是google的东西, 所以暂时只能用cpu做推理了, 好在速度也挺快, 30fps.
第一步, 通过pyautogui, 拿到屏幕的截图.
随便找个电影, 通过下面的一段话即可以截图图片.
img = pyautogui.screenshot(region=[0,0, window_width, window_height])0,0, 即截图开始的范围, 后面是宽高, 可以尽量大点, 比如占你桌面的左半部分.
截到图可以看看截图是否能行.
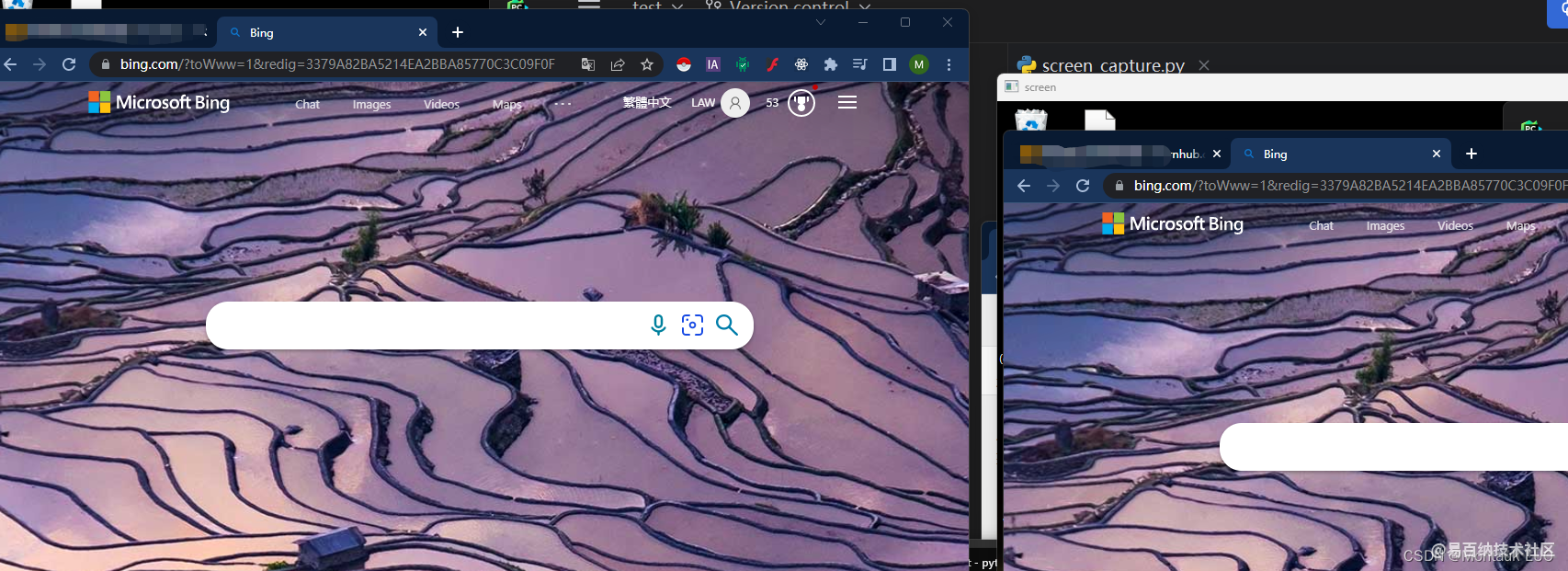
左边是原桌面, 后边是截图显示的cv2的imshow窗口.
media pipe是个好东西, 使用media pipe的face_detection, 可以很轻松拿到人脸上的关键点, 比如耳朵, 眼睛, 鼻子, 嘴巴的位置:
results = face_detection.process(image)
还是很准的, 当然也有很大的漂移, 但是最终我们只考虑它在一个维度, 就是纵向维度上的移动, 所以也没太大问题.
拿到鼻子的位置之后, 我们只需要简单做个减法, 拿这次的位置跟上次的位置做个相减, 就知道鼻子是向下移动还是向上移动了.
if y > last_y:if(y – last_y)*100> min_y:print(“down: “+ str((y – last_y)*100)) serialFd.write((bytearray(s,ascii)))else:if(last_y – y)*100> min_y:print(“up: “+ str((last_y – y)*100)) serialFd.write((bytearray(w,ascii))) last_y = y乘了一下方便观察, 不然小数点后面太多位.
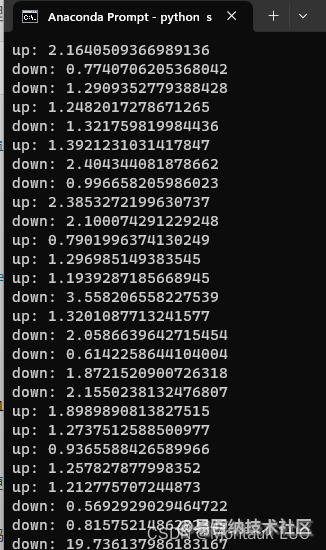
可以看到, 你已经完全捕捉到了, 她在垂直方向上的移动, 经过观察, 大差不差吧..
这个时候, 需要开动硬件了.
首先我们需要一个舵机, 一个舵机驱动, 一个arduino的开发板, 我直接用了esp32s, 本来打算用mqtt接网络的, 后来发现python可以直接串口, 省了好多功夫, 这里用uno啊, stm32啥都是可以的, arduino搞起来速度更快(你看, 我都不好意思用开发这个词, 因为arduino的东西, 压根我觉得都不能算是开发…)
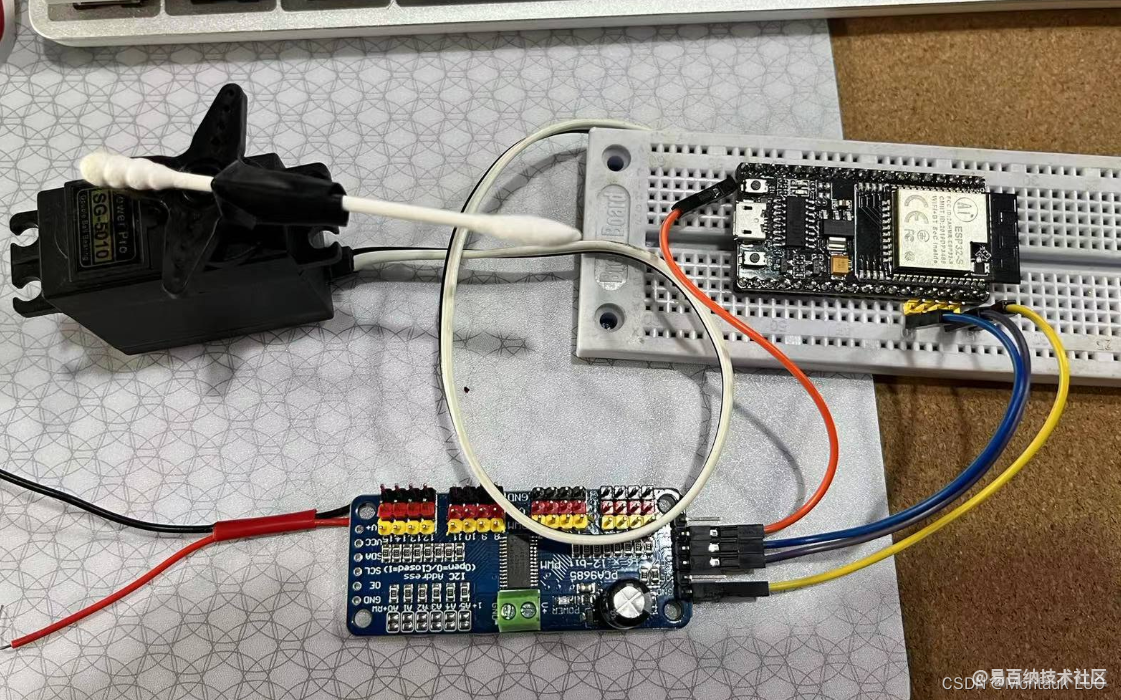
这个狗屎舵机驱动还有点问题, 你接电源的VCC竟然是没用的, 接上去舵机的电源输出只有0.5伏特, 只能直接把电源焊接到舵机的VCC了.
arduino的部分就简单了, 这个舵机驱动板是用I2C通讯的, 只需要用Wire, 就是arduino的I2C写pwm的占空比就行, 一头接串口发过来的字符, 一边控制舵机的位置(注意, 舵机是用pwm 占空比控制位置的, 这个跟普通电机还不太一样)
然后买板子的时候提供的资料, 或者说这个板子就是Adafruit的pwm驱动板的山寨, 所以有使用到他们的库.
/*************************************************** This is an example for our Adafruit 16-channel PWM & Servo driver Servo test – this will drive 16 servos, one after the other Pick one up today in the adafruit shop! ——> http://www.adafruit.com/products/815 These displays use I2C to communicate, 2 pins are required to interface. For Arduino UNOs, thats SCL -> Analog 5, SDA -> Analog 4 Adafruit invests time and resources providing this open source code, please support Adafruit and open-source hardware by purchasing products from Adafruit! Written by Limor Fried/Ladyada for Adafruit Industries. BSD license, all text above must be included in any redistribution ****************************************************/#include<Wire.h>#include<Adafruit_PWMServoDriver.h>// called this way, it uses the default address 0x40Adafruit_PWMServoDriver pwm =Adafruit_PWMServoDriver();// you can also call it with a different address you want//Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x41);// Depending on your servo make, the pulse width min and max may vary, you// want these to be as small/large as possible without hitting the hard stop// for max range. Youll have to tweak them as necessary to match the servos you// have!#define SERVOMIN 150// this is the minimum pulse length count (out of 4096)#define SERVOMAX 600// this is the maximum pulse length count (out of 4096)// our servo # counter//uint8_t servonum = 0;void setup(){Serial.begin(9600);Serial.println(“16 channel Servo test!”); pwm.begin();// pwm.setPWMFreq(60); // Analog servos run at ~60 Hz updates pwm.setPWMFreq(60);// Analog servos run at ~60 Hz updates pwm.setPWM(4,0,350);}// you can use this function if youd like to set the pulse length in seconds// e.g. setServoPulse(0, 0.001) is a ~1 millisecond pulse width. its not precise!void setServoPulse(uint8_t n,double pulse){double pulselength; pulselength =1000000;// 1,000,000 us per second pulselength /=60;// 60 HzSerial.print(pulselength);Serial.println(” us per period”); pulselength /=4096;// 12 bits of resolutionSerial.print(pulselength);Serial.println(” us per bit”); pulse *=1000; pulse /= pulselength;Serial.println(pulse); pwm.setPWM(n,0, pulse);}int incomingByte =0;uint16_t pos =300;uint16_t step =20;void chang_pos(bool upOrDown){// going upif(upOrDown){if(pos <(SERVOMAX – step)){ pos = pos + step;}}else{if(pos >(SERVOMIN + step)){ pos = pos – step;}} pwm.setPWM(4,0, pos);}void loop(){// 逐个读取串口的数据 incomingByte =Serial.read();if(incomingByte >0){// 在串口中显示输入的数据switch(incomingByte){case115:Serial.println(“down”); chang_pos(false);break;case119:Serial.println(“up”); chang_pos(true);break;}// Serial.print(“I received: “);// Serial.println(incomingByte, DEC);}}void _loop(){Serial.println(“running”);for(uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen++){ pwm.setPWM(4,0, pulselen); delay(4);} delay(500);for(uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen–){ pwm.setPWM(4,0, pulselen); delay(4);} delay(500);}值得一提的是, 这个简单的算法相当于对位置做了个微分的控制, 每次加减一点点..
最终的效果出奇的好, 最重要的是, 一共只花了我一晚上跟一上午几个小时时间, 能有这个效果, 我还是满意的…py的全部代码我也就直接贴下面了, 没多少.
import pyautoguiimport cv2import numpy as npimport mediapipe as mpimport serialimport serial.tools.list_portsplist = list(serial.tools.list_ports.comports())plist_0 = list(plist[0])# print(plist_0[0])serialName = plist_0[0]serialFd = serial.Serial(serialName,9600, timeout=60)print(“check which port was really used >”, serialFd.name)window_width =1200window_height =1300mp_face_detection = mp.solutions.face_detectionmp_drawing = mp.solutions.drawing_utilslast_y =0min_y =0.5with mp_face_detection.FaceDetection(model_selection=0, min_detection_confidence=0.5)as face_detection:while1: img = pyautogui.screenshot(region=[0,0, window_width, window_height])# 分别代表:左上角坐标,宽高# 对获取的图片转换成二维矩阵形式,后再将RGB转成BGR# 因为imshow,默认通道顺序是BGR,而pyautogui默认是RGB所以要转换一下,不然会有点问题 img = cv2.cvtColor(np.asarray(img), cv2.COLOR_RGB2BGR) image = img# image = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) results = face_detection.process(image)if results.detections: detection = results.detections[0]# results.detections[0].location_data.relative_bounding_box[2]# print(results.detections[0].location_data.relative_keypoints[2]) x = results.detections[0].location_data.relative_keypoints[2].x y = results.detections[0].location_data.relative_keypoints[2].y cv2.circle(image,(int(x * window_width), int(y * window_height)),10,(0,255,0),–1)if y > last_y:if(y – last_y)*100> min_y:print(“down: “+ str((y – last_y)*100)) serialFd.write((bytearray(s,ascii)))else:if(last_y – y)*100> min_y:print(“up: “+ str((last_y – y)*100)) serialFd.write((bytearray(w,ascii))) last_y = y# mp_drawing.draw_detection(image, detection)# for detection in results.detections:# mp_drawing.draw_detection(image, detection) cv2.imshow(“screen”, image)if cv2.waitKey(5)&0xFF==27:break遗留的问题:
这个纯粹是娱乐性质, 一方面算法都很粗糙, 一方面舵机控制肉灵芝, 是有点难为舵机了, 但是玩一下挺好mediapipe要移植到3588s或者nano, 1126上, 不知道效果如何拍了视频了, 有兴趣的加我微信索取, 这里实在没法放视频不知道审核让不让我过…CSDN拒了我3次, 算了…免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:media pipe 驱动硬件-pic驱动接线 https://www.yhzz.com.cn/a/9042.html