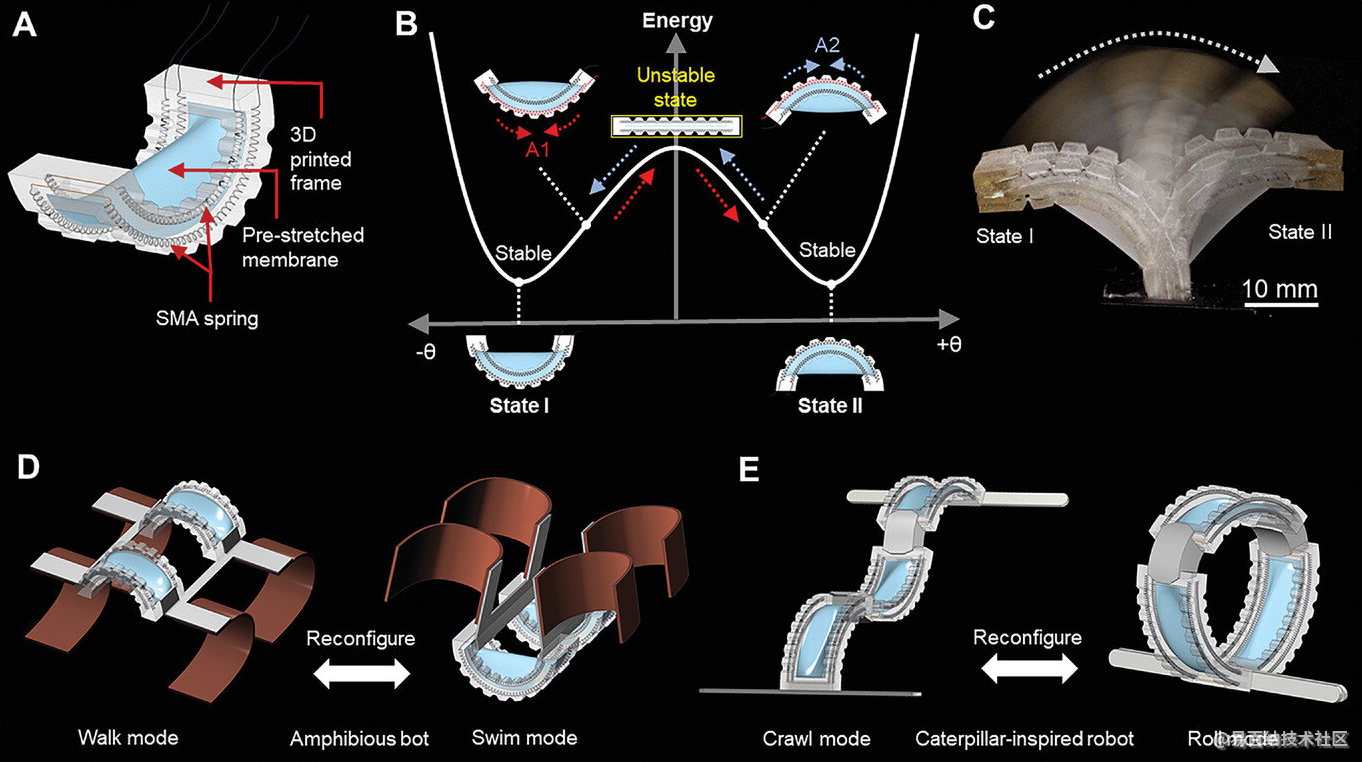
A)双稳态致动器的示意图,B)双稳态致动器从状态I到状态II的转换,C)从状态I触发到状态II的双稳态致动器的图片,可重构多模态和两栖软机器人的示意图(渲染图像),D)两栖机器人,E)受卡特彼勒启发的机器人
如果需要,大多数动物可以快速从步行到跳跃到爬行再到游泳,而无需重新配置或进行重大调整。
大多数机器人不能。但卡内基梅隆大学的研究人员已经创造了软机器人,可以无缝地从步行到游泳,或者从爬行到滚动。
“我们受到大自然的启发,开发了一种机器人,它可以执行不同的任务并适应其环境,而不会增加执行器或复杂性,”计算机科学学院人机交互研究所变形物质实验室的博士后研究员Dinesh K. Patel说。“我们的双稳态执行器简单、稳定且耐用,为未来动态、可重新配置的软机器人工作奠定了基础。
双稳态致动器由3D打印的软橡胶制成,其中包含形状记忆合金弹簧,通过收缩对电流做出反应,从而导致致动器弯曲。该团队使用这种双稳态运动来改变执行器或机器人的形状。一旦机器人改变形状,它就会保持稳定,直到另一个电荷将其变形回以前的配置。
“匹配动物如何从步行到游泳到爬行到跳跃是生物启发和软机器人的巨大挑战,”CMU工程学院机械工程系教授Carmel Majidi说。
例如,该团队创建的一个机器人将四个弯曲的致动器连接到由两个双稳态致动器组成的手机大小的身体的角落。在陆地上,弯曲的致动器充当腿,允许机器人行走。在水中,双稳态致动器改变机器人的形状,将弯曲的致动器置于理想的位置,充当螺旋桨,以便它可以游泳。
“你需要有腿才能在陆地上行走,你需要有一个螺旋桨才能在水中游泳。构建一个为每个环境设计的独立系统的机器人会增加复杂性和重量,“密歇根大学机器人学助理教授、Majidi的前博士生Xiaonan Huang说。“我们在两种环境中使用相同的系统来创建一个高效的机器人。
该团队还创造了另外两个机器人:一个可以爬行和跳跃,另一个可以爬行和滚动。
未来,机器人可用于救援情况或与海洋动物或珊瑚互动。在执行器中使用热活化弹簧可以开辟环境监测、触觉以及可重新配置的电子和通信应用。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:软机器人,可以轻松地从陆地转移到海洋-机器人软硬件 https://www.yhzz.com.cn/a/8980.html