一、实验目的
1.进一步了解ROS通信机制;
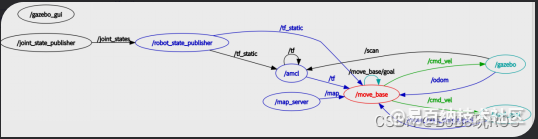
2.了解Turtlebot各个节点之间的关系;
3.熟悉使用ROS消息类型;
4.了解小车闭环控制。
5.了解rviz是如何将目标点发送出去的。二、实验环境
Ubuntu16.04+ROS 。
三、实验原理
发布者订阅者实现,发布者发出目标点,订阅者接受到后控制Turtlebo进行导航。
四、实验内容
1.获取rviz发送目标点的topic;
2.对已经建好的图获取相应目标点的坐标(多个,即小车要去的目标),还没建图先完成建图;
3.查阅资料,编写发布一目标点的python或c脚本;
4.编写发布多个目标点的python或c脚本。五、实验步骤
1.获取rviz发送目标点的topic;在这里插入图片描述
2.对已经建好的图获取相应目标点的坐标(多个,即小车要去的目标),还没建图先完成建图;打开gazebo roslaunch nav_sim myrobot_world.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
通过移动小车,设置目标点,记录左侧显示的位置坐标。x y z 和分别绕xyz轴旋转的角度:roll pitch yaw 3.查阅资料,编写发布一目标点的python或c脚本;#include<iostream>#include <ros/ros.h>#include<geometry_msgs/Twist.h>#include<geometry_msgs/PoseStamped.h>using namespace std;int flag=1;classGoal{public: geometry_msgs::PoseStamped goal;Goal(){ pub=n.advertise<geometry_msgs::PoseStamped>(“/move_base_simple/goal”,10);sub=n.subscribe(“/cmd_vel”,1,&Goal::callback,this); goal.header.frame_id =“map”;//改为自己记录目标点的坐标 goal.pose.position.x = pose.x; goal.pose.position.y = pose.y; goal.pose.position.z = pose.z; goal.pose.orientation.x = pose._x; goal.pose.orientation.y = pose._y; goal.pose.orientation.z = pose._z; goal.pose.orientation.w = pose._w;}private: ros::NodeHandle n; ros::Publisher pub; ros::Subscriber sub; void callback(const geometry_msgs::Twist&v);};void Goal::callback(const geometry_msgs::Twist&v){if(flag==1&&v.linear.x==0){ ROS_INFO(“Sending goal!”); pub.publish(goal);}}int main(int argc,char **argv){ ros::init(argc,argv,“send_goal”);Goal g; ros::spin();return0;}<
4.编写发布多个目标点的python或c脚本。#include<iostream>#include <ros/ros.h>#include<geometry_msgs/Twist.h>#include<geometry_msgs/PoseStamped.h>using namespace std;int flag=1;int g1=0,g2=0,g3=0;classGoal{public: geometry_msgs::PoseStamped goal_1; geometry_msgs::PoseStamped goal_2; geometry_msgs::PoseStamped goal_3;Goal(){ pub=n.advertise<geometry_msgs::PoseStamped>(“/move_base_simple/goal”,10); sub=n.subscribe(“/cmd_vel”,1,&Goal::callback,this); goal_1.header.frame_id =“map”; goal_2.header.frame_id =“map”; goal_3.header.frame_id =“map”;//以下三个目标的改为自己目标点的信息//Goal one goal_1.pose.position.x =0.033449; goal_1.pose.position.y =8.273015; goal_1.pose.position.z =0.050003; goal_1.pose.orientation.x =0; goal_1.pose.orientation.y =0; goal_1.pose.orientation.z =0; goal_1.pose.orientation.w =1.487145;//Goal two goal_2.pose.position.x =–0.207746; goal_2.pose.position.y =17.607371; goal_2.pose.position.z =0.050003; goal_2.pose.orientation.x =0; goal_2.pose.orientation.y =0; goal_2.pose.orientation.z =0; goal_2.pose.orientation.w =1.483080;//Goal three goal_3.pose.position.x =2.467109; goal_3.pose.position.y =9.938154; goal_3.pose.position.z =0.050002; goal_3.pose.orientation.x =0; goal_3.pose.orientation.y =0; goal_3.pose.orientation.z =0; goal_3.pose.orientation.w =–1.889479;}private: ros::NodeHandle n; ros::Publisher pub; ros::Subscriber sub; void callback(const geometry_msgs::Twist&v);};void Goal::callback(const geometry_msgs::Twist&v){//发送第一个目标点,如果发送成功,v将大于0if(flag==1&&v.linear.x==0){ ROS_INFO(“Sending goal one!”); pub.publish(goal_1); g1=1;}if(v.linear.x>0&&flag==1) flag=2;if(flag==2&&v.linear.x==0&&g1){ ROS_INFO(“Sending goal two!”); pub.publish(goal_2); g2=1;}if(v.linear.x>0&&flag==2&&g2) flag=3;if(flag==3&&v.linear.x==0&&g2){ ROS_INFO(“Sending goal three!”); pub.publish(goal_3); g3=1;}}int main(int argc,char **argv){ ros::init(argc,argv,“many_goal”);Goal g; ros::spin();return0;}
<
在CMakeLists.txt文件中添加
add_executable(send_goal src/send_goal.cpp)target_link_libraries(send_goal ${catkin_LIBRARIES})add_executable(many_goal src/many_goal.cpp)target_link_libraries(many_goal ${catkin_LIBRARIES})六、实验数据与结果评价
实验数据:
1.目标点数:3个
2.目标点位置:
one
0.033449;y:8.273015;z:0.050003;_x:0;_y:0;_z:0;_w:1.487145;
two
-0.207764;y:17.607371;z:0.050003;_x:0;_y:0;_z:0;_w:1.483080;
three
2.467109;y:9.938154;z:0.050002;_x:0;_y:0;_z:0;_w:-1.889479;
3.坐标系frame_id :map 结果评价:1.脚本能否发送目标点可以,但需要手动点2D Nav Goal
 2.Turtlebot到达一个目标点后能否继续发送第二个目标点
2.Turtlebot到达一个目标点后能否继续发送第二个目标点可以

 注:也可以不用Turtlebot,使用nav _sim包的小车或者racecar的minicar。
注:也可以不用Turtlebot,使用nav _sim包的小车或者racecar的minicar。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:基于ROS通信机制的多点导航实验-基于row格式的复制由于 https://www.yhzz.com.cn/a/8695.html