作者:于心俊,乔瑞林,王艳芳
1 引言
粮食在贮藏过程中,会因为受温度、湿度、氧气、微生物及昆虫等因素的影响,而造成其质量的不良变化。对粮食贮藏过程中的影响参数进行实时监测、分析是保障粮食储存品质的有效手段。本文通过采用虚拟多传感器信息融合技术对粮食储藏过程中的粮情变化进行实时跟踪分析,当粮食出现霉变、虫害等不良变化时,系统能及时发出预警信息,确保储粮安全。
2 虚拟多传感器
虚拟多传感器是对一个传感器所获的数据采用不同的信息处理算法进行变换、特征提取, 得到具有不同特征的信息,将这些信息进行融合得到更加可靠准确的信息。其最大的特点就是信息冗余、信息互补和信息实时。其优点就是能减少数据量及其计算量,提高信息的准确性。在粮食储藏过程中,通过温湿度传感器、高清晰图像传感器得到粮食及环境的温湿度和图像信息,对所获得的温湿度、图像信息采用不同的信息处理算法进行变换和特征提取,得到具有不同特征信息的虚拟温湿度、图像传感器数据,然后利用(Dempester-Shafer;D-S)证据理论将这些信息进行融合,可以得到在粮食储藏过程中粮情的变化过程。其虚拟多传感器信息融合过程如图l所示。
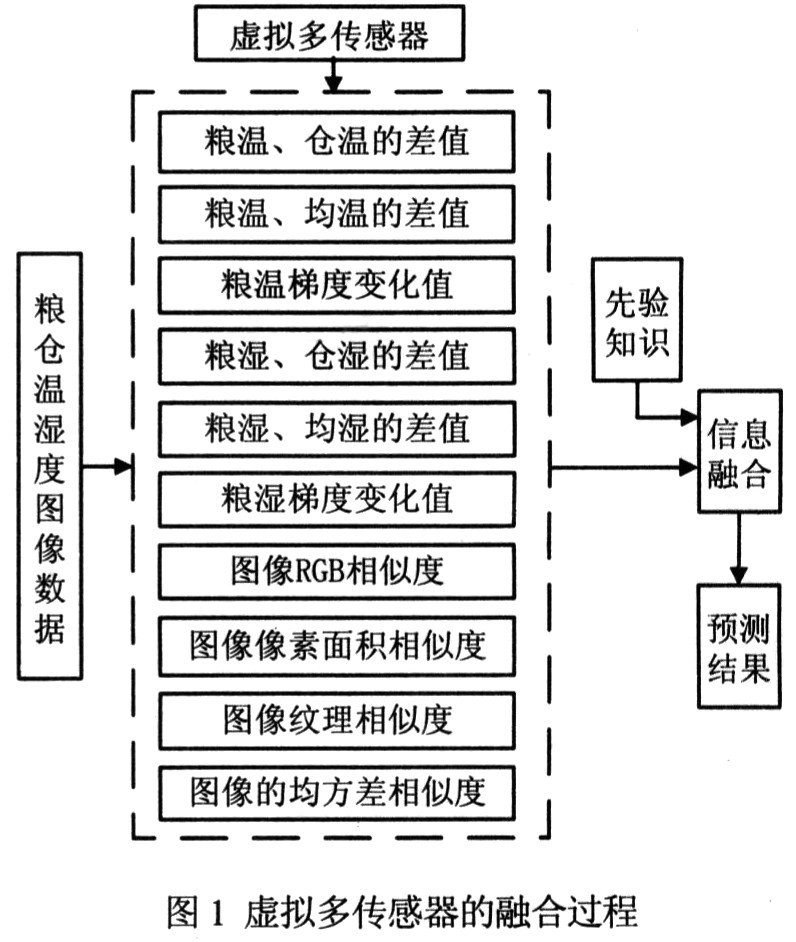

在粮食仓储过程中,如果储粮区域的温度、湿度在一段时间内保持在适合霉菌或害虫生长的范围内,粮食就会发生霉变或虫害。通过高精度温湿度传感器得到温湿度的实时变化数据。同时在某种程度上也会造成粮食外观颜色、体积、纹理等细微变化。这种变化利用肉眼很难分辨,通过一定算法对图像进行特征提取,得到具有不同特征的虚拟图像传感器信息。对这些具有不同特征的信息进行融合,可以预测到粮食发生霉变或虫害的时间。
2.1 温湿度信度变换
对实时采集到的实际温度值t1,采用(1)式得到温度的信度值m1;粮食温度与仓温的差值的信度值m2,粮食温度与平均温度的差值的信度值m3,粮食温度梯度变化的信度值m4;实时采集到的实际湿度值h1,采用(2)式得到湿度的信度值n1;粮食湿度与仓湿的差值的信度值n2,粮食湿度与平均湿度的差值的信度值n3,粮食湿度梯度变化的信度值n4。

式中:Ti一经验值;ki一加权系数;ti=1一温度值。ti=2一粮食温度与仓温的差值。ti=3一粮食温度与平均值的差值。ti=4一粮食温度梯度值。

式中:Hi一经验值;ki—加权系数;hi=1一湿度值。hi=2一粮食湿度与仓湿的差值。hi=3一粮食湿度与平均值的差值。hi=4一粮食湿度梯度值。
2.2 图像特征提取
图像的特征提取,通过对目标图像与源图像进行RGB颜色的相似度、区域面积的相似度、纹理特征相似度的分析,得到粮情变化的情况。
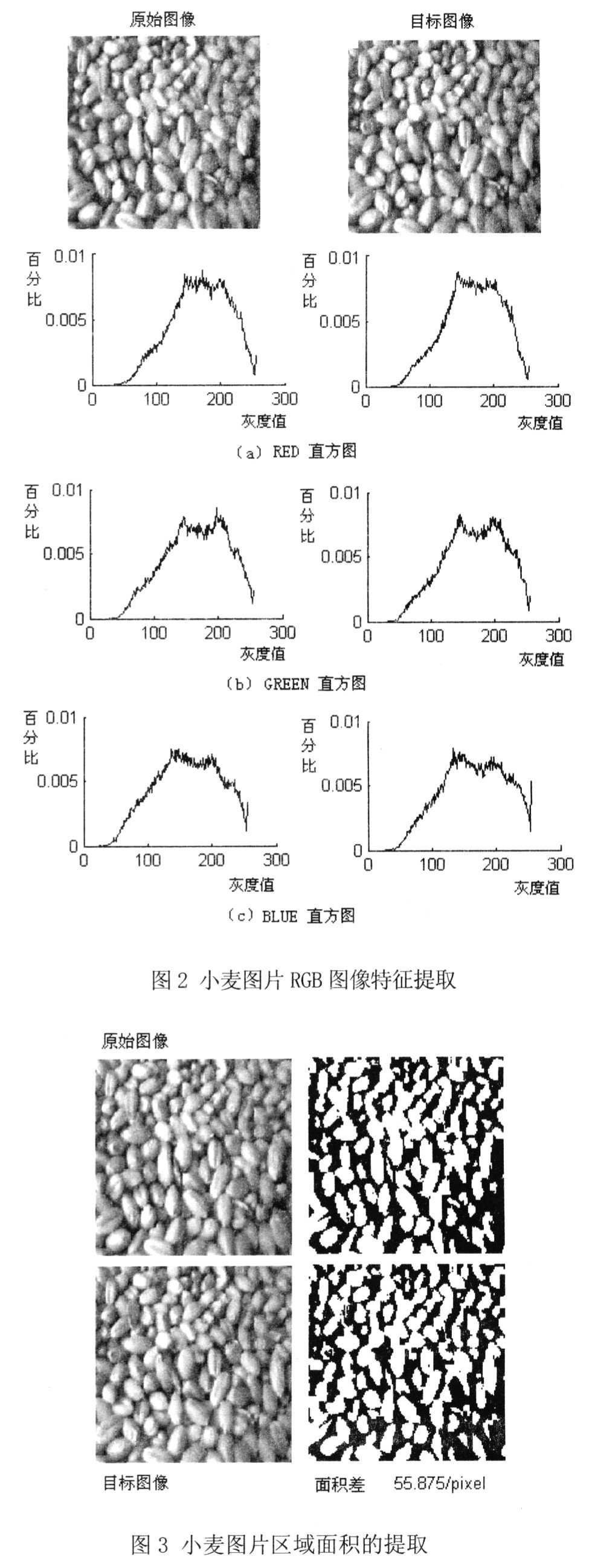
RGB颜色的相似度分析。对于图像的颜色用直方图可以表示为式(3):

其中:A、B、C分别表示所有像素中三基色(RGB)所占的比例。N表示图像像素数。所得到RGB图像(又称真彩色图像)是以m×n×3的3D矩阵的方式存储,分别定义了m×n图像的每个像素中所包含三基色各自的强度。因此RGB直方图是对“色阶一像素数”的归一化统计结果。
对目标图像和源图像的直方图统计结果,可认为是矢量。比较两幅图像的颜色相似度,可转化为对矢量空间中两个点空间距离的计算。计算方法可以采用式(4)欧几里德距离(euclidean distance)。

其中:h和g分别代表两幅图像的颜色直方图。
小麦图片RGB颜色的相似度的提取如图2所示。
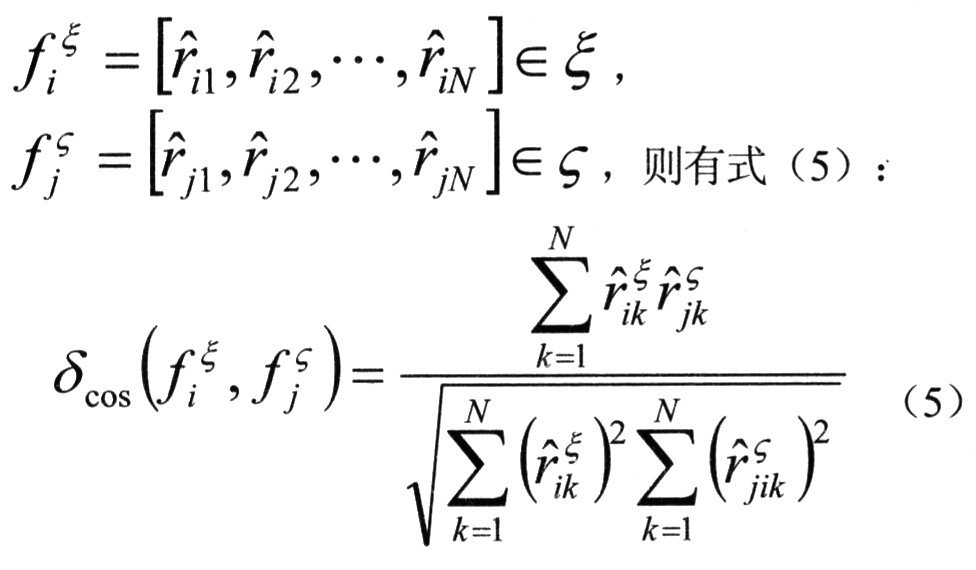
区域面积的提取利用最大类间方差(OTSU)对灰度图像进行自适应阈值分割,实现目标的提取。它是按图像的灰度特性,将图像分成背景和目标两部分。背景和目标之间的类问方差大,说明构成图像的这两部分的差别越大。当部分目标错分为背景或部分背景错分为目标都会导致图像这两部分差别变小。因此,使类间方差最大的分割意味着错分概率最小。小麦图片区域面积的提取如图3所示。
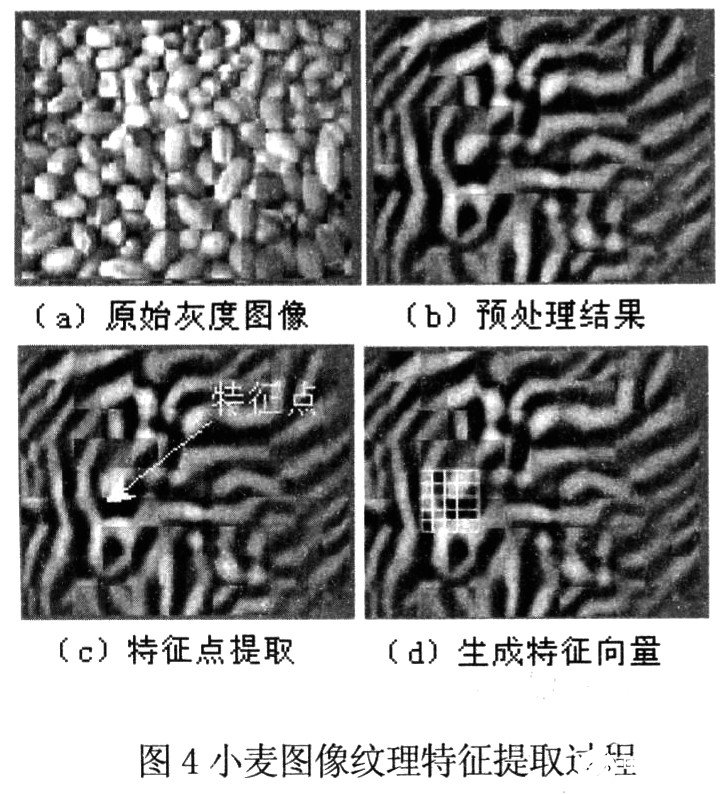
通过对粮食颗粒的灰度图像进行纹理分析,获得与结构相关的灰度分布的统计信息,可以实现对两幅图像的匹配分析,并作为判断粮情变化的依据。对粮食颗粒灰度图像的分析采用基于不变矩的图像纹理的统计算法。该算法首先将原始图像进行分块,利用加窗傅立叶变换进行空域滤波增强,去除图像在各个空间频率处的噪声,增强图像中的纹理结构信息。然后选择图像中曲率最大的点进行特征提取,以提取的特征点为中心,对图像进行局部的网格化处理,针对每个单元格计算其7个不变矩,对所有单元格各自的不变矩求和得到特征向量。同时借助最大类间方差阈值分割方法(OTSU),将图中的单元格区分为前景和背景,并在求和时赋予不同的权重,可进一步提高图像匹配的精度。小麦图像纹理特征提取过程如图4所示。最后利用特征空间中两特征向量间的距离作为相似度衡量的标准。可采用余弦距离来表示。特征向量间余弦距离的定义为:设特征空间中两特征向量分别为
3 信息融合
通过以上方法将温湿度、图像数据经过变换,得到具有不同特性的虚拟多传感器信息。利用D-S证据理论进行信息融合,D-S证据理论是由Dempster提出来的用概率上下限来表示实际问题中的不确定性,后来通过ShaRer进一步发展成为系统化、理论化的不确定性推理理论。由于篇幅有限,在此只给出部分信息融合过程。
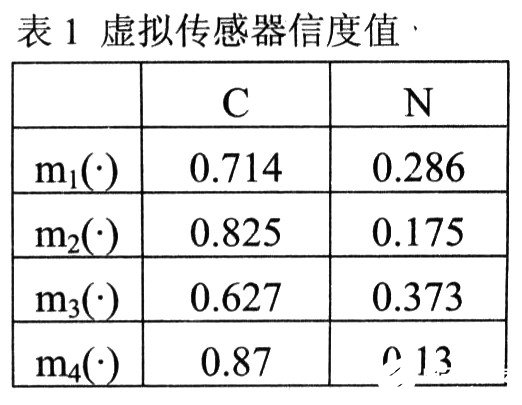
通过实际测量的数据,经过计算得到某一区域的四个虚拟传感器信度值m1,m2,m3,m4如表l,用C表示可信度,N表示不可信度。
按照Dempster组合公式将m1和m2,m3和m4组合,结果如表2所示,其中φ表示空集。
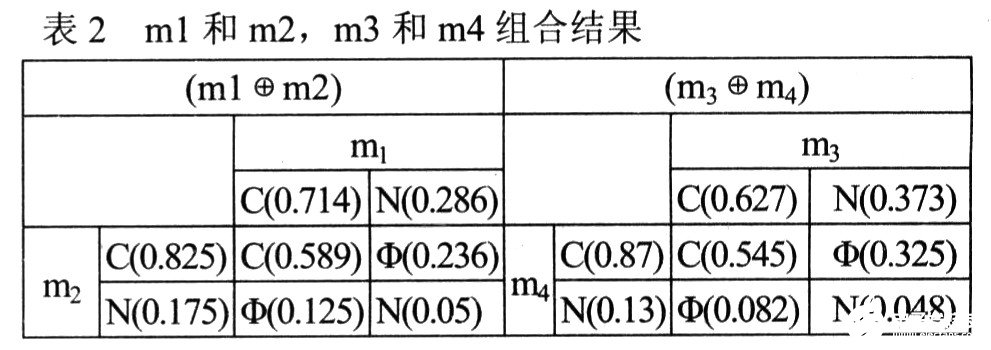
由表2可以得到m1和m2,m3和m4两个证据的不一致因子,分别用k1,k2表示。则kl,k2为:k1=0.236+0.125=0.361:k2=0.325+0.082=0.407计算得到两个基本信度m1和m2融合后的基本信度分配(用m12表示),m3和m4融合后的基本信度分配(用m34表示)为:

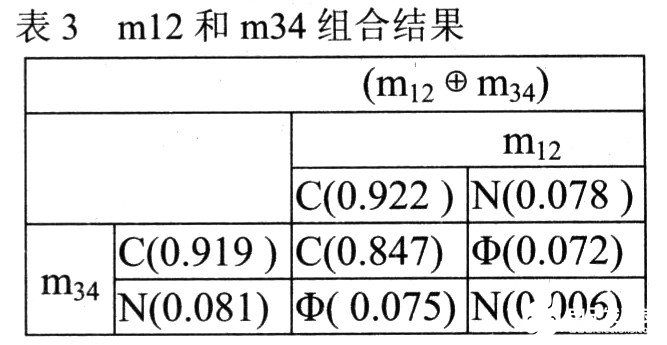
最后再对得到两个基本信度m12和m34融合,基本信度分配(用m1234表示),见表3。
则有:k=0.072+0.075=0.147
m1234(C)=0.847/(1-k)≈0.99
由结果可知,通过融合后粮情变化的基本信度为0.99,故可以明显地判断出该区域的粮情变化很大,发生霉变、虫害的可能性较高。
4 结论
本文通过对小麦仓储过程中的传感器信息选取合适的特征和计算所对应的特征统计量,应用少量的传感器,借助虚拟多传感器的技术以及D-S证据理论融合算法,能够在粮情监测中完成目标识别,并对小麦仓储过程中所发生的不良变化,及时发出预警信息,以确保小麦储藏安全。
责任编辑:gt
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:基于虚拟多传感器实现粮情实时跟踪预警系统的设计-虚拟传感器技术 https://www.yhzz.com.cn/a/822.html