数字同步网是数字通信网正常运行的基础,也是保障各种业务网运行质量的重要手段。他与电信管理网、信令网一起并列为电信网的3大支撑网,在电信网中具有举足轻重的地位。
1 数字同步网的基本原理和结构
对于任何通信设备,都需要时钟为其提供工作频率,所以时钟性能是影响设备性能的一个重要方面。时钟常被称为设备的心脏。时钟工作时的性能主要由2个方面决定:自身性能和外同步信号的质量。而外同步信号的质量就是由数字同步网来保证的。当设备组成系统和网络后,数字同步网必须为系统和网络提供精确的定时,以保障其正常运行。网内各节点时钟的精度影响一个数字通信网工作是否正常。
数字同步网是一个由节点时钟设备和定时链路组成的实体网,他通过网同步技术为各种业务网的所有网元分配定时信号(频率或者时间信号),以实现各种业务网的同步。网同步是指为了保证数字通信网正常工作,分配定时信号到网内所有节点,要求网内所有节点的时钟频率和相位严格控制在一定的容差范围内。
数字同步网的结构主要取决于同步网的规模、网络中的定时分配方式和时钟的同步方法,而这些又取决于业务网的规模、结构和对同步的要求。同步网一般可分为准同步方式和同步方式2大类。准同步方式常用于国际间链路,各节点独立设置基准时钟(如铯原子钟),其时钟基准一般都优于或满足G.811规定的基准钟,频率准确度保持在10-11极窄的频率容差之内。各国国内的数字通信网则普遍采用同步方式,节点时钟之间一般采用主从同步方法:将网内节点时钟分级,各级时钟具有不同的频率准确度和稳定度。设置高稳定度和高准确度时钟(如铯原子钟或GPS时钟,其频率准确度应≤±1×10-11/d)为基准主时钟(最高级时钟或一级时钟),网内其他节点时钟则称为从时钟,用从时钟锁相环技术与基准主时钟(或上一级时钟)频率同步,使全网时钟工作在同一频率上。
我国的数字通信网规模庞大,分布范围广,所以数字同步网一般要接受几个基准主时钟共同控制。如果采取定时链路来传输定时信号,那么随着数字传输距离的增长,传输损伤逐渐增大、可靠性逐渐降低。而利用装配在基准钟上的GPS接收机跟踪UTC(世界协调时),来实现对基准钟的不断调整,使之与UTC保持一致的长期频率准确度,从而达到各个基准钟同步运行和全网高度同步的目的是切实可行的,也是方便实用的。并且,在数字同步网中采用GPS配置基准钟,实现方法简单,同步时间精度高,提高了全网性能,成本却相对低廉,并且便于维护管理,所以GPS时钟在基准钟中得到广泛使用。
2 GPS授时的基本原理
GPS是NAVSTAR/GPS(Navigation SatelliteTiming and Ranging/Global Positioning System)的简称,是由美国国防部研制的导航卫星测距与授时、定位和导航系统,由21颗工作卫星和3颗在轨备用卫星组成,这24颗卫星等间隔分布在6个互成60°的轨道面上,这样的卫星配置基本上保证了地球任何位置均能同时观测到至少4颗GPS卫星。GPS由3部分构成:
①GPS卫星(空间部分);
②地面支撑系统(地面监控部分);
③GPS接收机(用户部分)。
GPS向全球范围内提供定时和定位的功能,全球任何地点的GPS用户通过低成本的GPS接收机接受卫星发出的信号,获取准确的空间位置信息、同步时标及标准时间。GPS要实时完成定位和授时功能,需要4个参数:经度、纬度、高度和用户时钟与GPS主钟标准时间的时刻偏差,所以需要接受4颗卫星的位置。若用户已知自己的确切位置,那么接受1颗卫星的数据也可以完成定时。
若设(x,y,z)为接收机的位置,(xn,yn,zn)为已知卫星的位置,则列解下列方程就可以得到x,y,z和标准时间T:
(X-X1)2+(y-y1)2+(z-z1)2=C2(T+ΔT-T1-t1)
(x-x2)2+(y-y2)2+(z-z2)2=C2(T+ΔT-T2-t2)
(x-x3)2+(y-y3)2+(z-z3)2=C2(T+ΔT-T3-t3)
(x-x4)2+(Y-y4)2+(z-z4)2=C2(T+ΔT-T4-t4)
其中:ΔT为用户时钟与GPS主钟标准时间的时差;
Tn为卫星n所发射信号的发射时间;
tn为卫星n上的原子钟与GPS主钟标准时间的时差。
由于GPS采用被动定位原理,所以星载高稳定度的频率标准是精密定位和授时的关键。工作卫星上一般采用的是铯原子钟作为频标,其频率稳定度达到(1~2)X10-13/d。GPS卫星上的卫星钟通过和地面的GPS主钟标准时间进行比对,这样就可以使卫星钟与GPS主钟标准时间之间保持精确同步。GPS卫星发射的几种不同频率的信号,都是来自卫星上同一个基准频率。GPS接收机对GPS卫星发射的信号进行处理,经过一套严密的误差校正,使输出的信号达到很高的长期稳定性。定时精度能够达到300ns以内。在精确定位服务PPS(Precise Position Service)下,GPS提供的时间信号与UTC之差小于100ns。若采用差分GPS技术,则与UTC之差能达到几个纳秒。
3 GPS时钟的实现方法
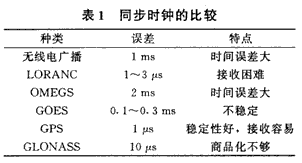
常规时钟频率产生方法可以是晶体、铷钟等。但晶体会老化,易受外界环境变化影响,长期的精度漂移影响;原子钟长期使用后也会产生偏差,需要定时校准。而GPS系统由于其工作特性的需要,定期对自身时钟系统进行修正,所以其自身时钟系统长期稳定,具有对外界物理因素变化不敏感特性。晶体或铷钟以GPS为长期参考,可以获得低成本、高性能的基准时钟。现有同步时钟的比较如表1所示。
在网络正常工作状态下,GPS时钟具有与GPS主钟相同的频率准确度;由于在某些特殊情况下GPS时钟信号会暂时消失,所以基于GPS的时钟模块一般需要另一个外部时钟作为后备输入,预留有外接时钟的时基和频标信号(如GLONASS、中国双星、铷原子钟等)接口。另外,GPS时钟其频率准确度还具有自身保持性能。
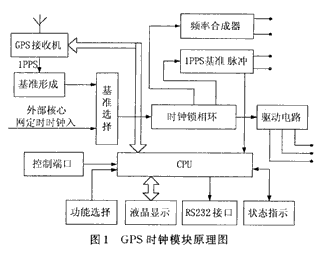
GPS时钟频率模块提供所需的各种时频的信号,并输出定位时间信息、GPS接收机是否工作正常、输出的时间信号是否有效、时钟和频率处理模块激活状态、异常告警等等。图1是GPS时钟模块的原理图
4 现状与展望
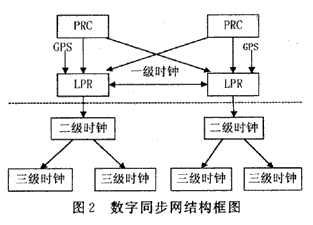
根据《中华人民共和国通信行业标准数字同步网工程设计规范》,数字同步网按分布式多个基准时钟的组网建设,以基准钟的同步范围划分同步区,每个同步区内采用主从同步方法。区域基准钟(LPR)的主用基准为GPS,备用基准来自全网基准钟(PRC)。LPR平时以接收GPS信号为主用信号,以接收PRC信号为备用。GPS不可用时,LPR同步于PRC。
我国现有数字同步网的网络结构如图2所示。
由于GPS全球卫星定位系统归美国政府所有,受控于美国国防部,对世界各地的用户未有任何政府承诺,而且用户只支付了GPS接收机的费用,并未支付GPS系统的使用费用,因此这种方法自主性差,也带来一些不稳定因素,例如故意降低GPS精度;关闭GPS在某个地区的发送信号;增加随机扰码;周围环境对GPS无线信号的干扰等。
可以充分利用但不能完全依靠,因此还需要有由铯钟组成的基准钟PRC,以他作为全网同步的根本保证。还有GPS在某些特殊情况下信号暂时消失,或者GPS不正常工作,这些可以通过监控GPS数据来发觉,这些情况如果不做处理带来的结果是基准钟将降质为二级时钟,所以此时要控制区域基准钟(LPR)改为同步于全网基准钟(PRC),同步质量就可以保证。
目前有GPS、CLONASS、北斗双星导航卫星系统CNSS、欧洲GALILEO等多元化定位资源环境,可以打破了独家垄断,促使资源更加开放。
可以利用市场上现在有的GPS/GLONASS双模接收机、GPS/北斗双模终端进行时钟同步,则可在很大程度上保证同步质量,还可以提高同步精度。例如GPS/GLONASS双模接收机输出时间信号1PPS的准确度如表2所示。

由此可见,使用GLONASS授时精度不会降低;在GPS/GLONASS模式下,其授时精度还可以获得进一步改善。
责任编辑:gt
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:基于GPS时钟实现数字同步网工程的应用设计-基于gps时钟实现的方法 https://www.yhzz.com.cn/a/802.html