电子发烧友网报道(文/李宁远)在汽车传感里,摄像头、雷达以及激光雷达的应用至关重要。目前的ADAS应用里,基于这三种传感的基础方案以及融合方案非常多,还没有说哪一个传感技术能够完全占据上风,每一种技术都有自己独特的优势以及避不开的劣势。
毫米波成像雷达与传统毫米波雷达
摄像头和激光雷达上车的优异表现催生了毫米波成像雷达的诞生,这倒不是说传统毫米波雷达性能并不优秀。毫米波雷达作为车用传感器里已经相对成熟的一类器件,在辅助驾驶里已经有了多年的经验积累。对于L2+级别的汽车,毫米波雷达高分辨率带来的稳定的点云收集是车辆完成360°环境感知的关键。但这还不够,对L3、L4及以上的车型来说,车辆需要采用更高的分辨率识别更小的物体。
而且随着自动驾驶等级的提升,传统毫米波在技术层面的软肋会愈发明显。很明显的一个软肋就是“幽灵刹车”的误报,这是因为传统毫米波雷达在纵向测高能力上并不理想,会将物体错误感知到水平面上。这都和分辨率受限有关,这里指的是角度上的分辨率,没有俯仰分辨率则意味着无法测量高度,仰角分辨率的不足会导致雷达忽略静态物体,无法实现感知和自由空间映射(可行驶区域)。
成像雷达,区别于传统毫米波雷达,受益于在角度分辨率上的提高,其对汽车可自由行驶区域映射增强了很多,实现更强大感知和自由空间映射,可以避开运动以及静止的障碍物,更有效地消除误报,解决“幽灵刹车”等问题。
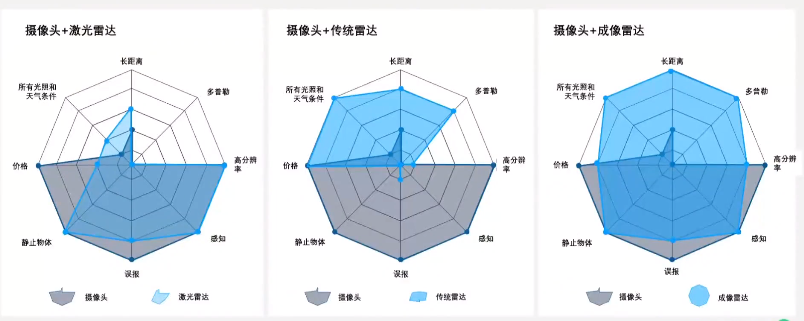
(不同融合方案优劣势对比,Arbe)
上图是成像雷达头部厂商Arbe给出的不同传感器融合之后的感知能力对比,成像雷达在高分辨率、感知以及误报这几项上明显超出了传统毫米波雷达。
成像雷达如何实现?
成像雷达实现无外乎是在硬件上增加大量的天线收发通道数量,扩大天线孔径的同时满足水平和垂直方向对分辨率的要求。方法并不复杂但是实现起来也并不是那么容易。
目前分辨率最高的应该是全力押宝成像雷达的Arbe,Arbe走的是将多发多收天线集成在一颗芯片,直接提供成像雷达芯片。传统的毫米波雷达拥有12个虚拟通道,Arbe的成像雷达拥有2304个虚拟通道,配置了由48个接收通道和48个发射通道组成的专用射频芯片组。为了解决这种量级的数据,现成的通用处理器或FPGA已经不够用了,为此Arbe设计了专有ASIC和DSP实时处理成像雷达大量的原始数据。如此复杂的设计与远超同行的分辨率所以其价格也是同行的数倍。
NXP、博世、TI等传统雷达天线及芯片方案商走的是将标准雷达芯片进行多芯片级联,以增加天线数量。今年NXP推出的专用16nm成像雷达处理器S32R45量产,基于该方案开发的4D成像雷达支持192个虚拟天线通道,可同时提供短、中、远程三合一多模式雷达。
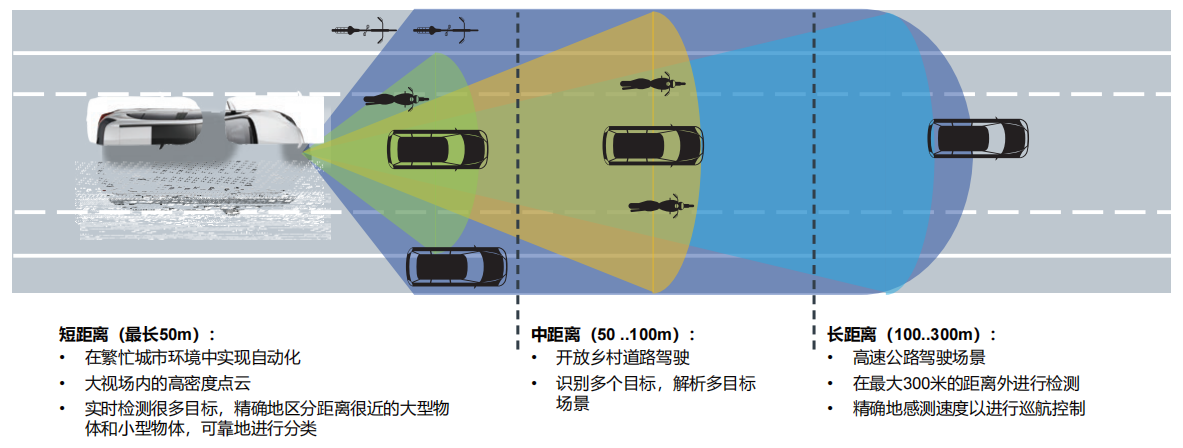
(成像雷达同步三光束多模探测,NXP)
此前华为发布的成像雷达采用12个发射通道,24接收通道,比常规毫米波雷达3发4收的天线配置提升24倍,其大阵列设计支持的短波形能实现120°内150米感知覆盖,长波形则同样能支持18°内超过300米感知覆盖。
还有通过软件来实现的办法,例如Oculii的虚拟孔径成像软件,基于传统的CMOS雷达芯片,可以在不需要给雷达增添更多的实体天线的前提下指数级提高传统毫米波雷达的各项性能达到成像雷达的性能效果。
算法也是成像雷达不可忽视的关键点,成像雷达可以基于整体点云的方式,与后续的其他感知做前数据融合,也可以让每个传感器各自检测追踪后然后再做前数据融合,进而从算法层做场景理解。算法的加持下成像雷达不需要另外的传感去做速度、角度等参数的测量就能实现自动运动检测。考虑到成像雷达感知算法门槛较高,不少成像雷达供应商都会提供标准化的SDK软件包。
小结
虽然单一传感想要在自动驾驶传感里独当一面还是很困难,但成像雷达在性能各方面优异的表现的确推动了更高级别自动驾驶的发展。在成本允许的前提下,未来成像雷达、激光雷达和摄像头形成互为冗余备份和补充的系统将是自动驾驶最合适的感知方案。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:毫米波雷达革命,成像雷达加速自动驾驶升级-毫米波雷达slam https://www.yhzz.com.cn/a/7746.html