FreeRTOS简介
FreeRTOS,全称Free Real Time Operating System,即免费的实时操作系统。相比于计算机中用到的Windows,MacOS,Linux等操作系统,实时操作系统(RTOS)是一种轻量级的操作系统,适用于嵌入式硬件中,用于解决单片机类裸机轮询方式在处理多个任务时的实时性不高的问题。
目前的实时操作系统有好多种,除FreeRTOS外,还有μCOS、RT-Thread、RTX、Alios Things、Huawei LiteOS等。
什么是RTOS?
实时操作系统(RTOS)的主要特点是可以实现多任务,与多任务系统相对的是裸机系统。
裸机系统
裸机系统就是最初我们学习单片机编程时接触的那种编程方式,main函数中一个while大循环依次处理各个模块的任务,对于需要及时检测的事件会使用中断。这种使用大循环的程序运行方式也叫轮询系统,加上中断处理函数后又称前后台系统,中断处理称作前台,无限循环称作后台。
多任务系统
多任务系统是将各个处理模块编写为单独的任务,每个任务本身是个无限循环,程序运行初期会创建各个子任务,通过任务调度的方式,利用各任务的阻塞时刻不断切换运行各个任务,达到一种看起来是多个任务在同时运行的一种效果。并且,通过中断标志以及任务间通信的相关机制,可以实现任务之间的快速响应。
FreeRTOS特点
使用免费!
系统简单小巧、文件数量少、通常情况下内核占用4~9k字节空间
抢占式内核
代码主要由C编写,可移植性高,已实现在30多种架构的芯片上移植
任务与任务,任务与中断间的通信方式包括:信号量、消息队列、事件标志组、任务通知
具有优先级继承特性的互斥信号令,避免优先级反转问题
高效的软件定时器
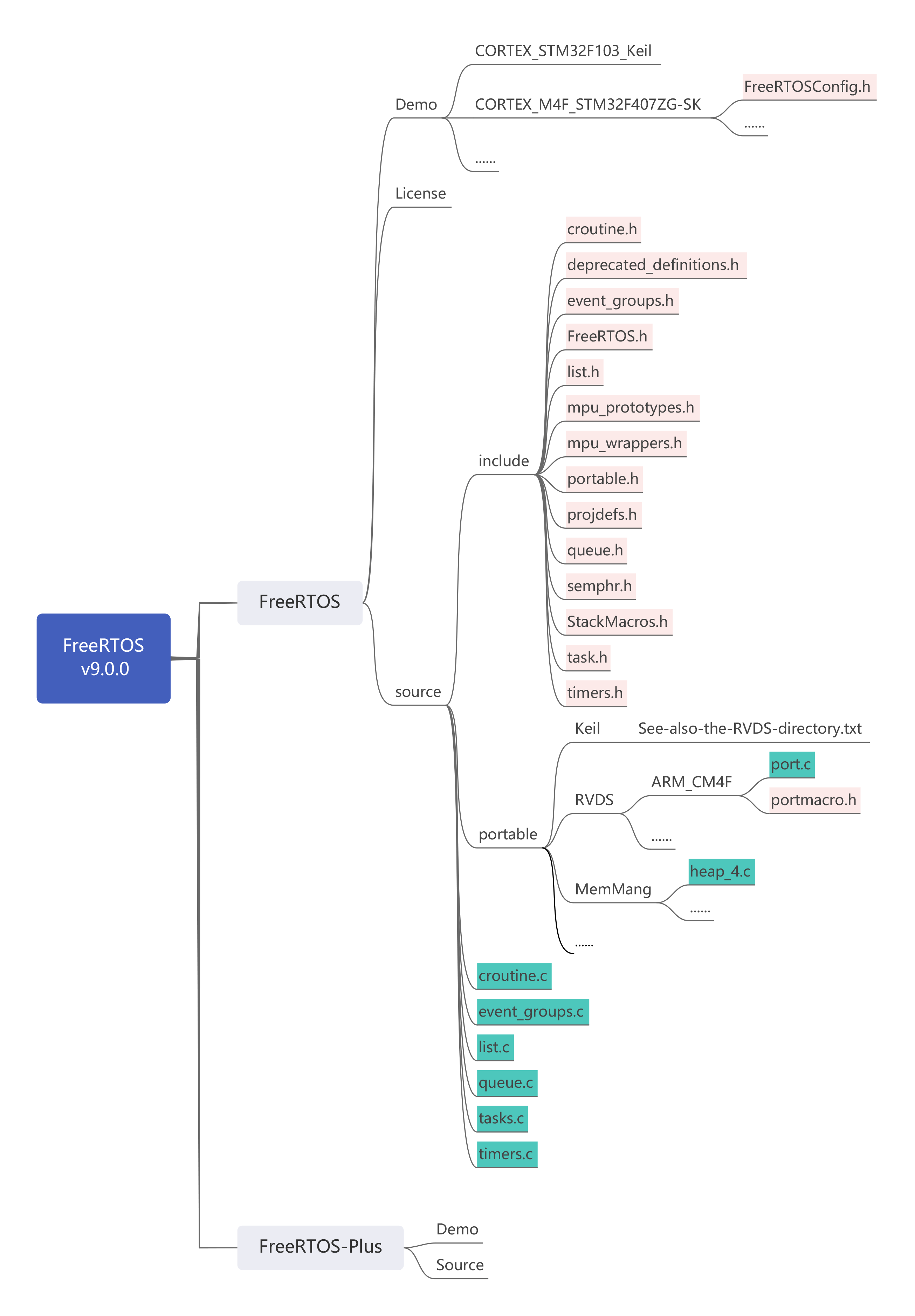
FreeRTOS源码目录结构
这里以FreeRTOS v9.0.0版本为例,代码包含FreeRTOS和FreeRTOS-Plus文件夹,后者是一些补充文件,初学者用不到,可以先忽略。在FreeRTOS文件夹中主要关注source文件夹,这里是FreeRTOS的全部源码,包括6个c文件和include文件夹下的多个h文件。另外,在portable文件夹下,是针对不同硬件平台的单独区分使用的代码,目前考虑使用Keil开发STM32F407,所以portable文件夹只需使用RVDS的ARM_CM4F以及MemMang。
关于各个c文件的主要用途:
port.c : 针对不同硬件平台的接口
heap_4.c : 内存管理相关
croutine.c : 协程相关
event_groups.c : 事件标志组相关
list.c : 列表,FreeRTOS的一种基础数据结构
queue.c : 队列相关
tasks.c : 任务创建、挂起、恢复、调度相关
timers.c : 软件定时器相关
另外在Demo文件夹下还需要用到一个FreeRTOSConfig.h,该文件中通过各种宏定义的方式来配置FreeRTOS需要使用哪些资源。
任务相关API函数
任务创建 xTaskCreate()
函数原型(tasks.c中):
复制BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, const char * const pcName, const uint16_t usStackDepth, void * const pvParameters, UBaseType_t uxPriority, TaskHandle_t * const pxCreatedTask )参数:
pxTaskCode:自己创建的任务函数的函数名
pcName:任务的名字,随意起,字符串型
usStackDepth:任务堆栈大小(实际上申请到的是这里的4倍),设的太小任务可能无法运行!
pvParameters:任务函数的参数,不需要传参设为NULL即可
uxPriority:任务优先级,0~(configMAX_PRIORITIES-1)
pxCreatedTask:任务句柄,实际是一个指针,也是任务的任务堆栈
返回值:
pdPASS:数值1,任务创建成功,且添加到就绪列表
错误代码:负数,任务创建识别
这里的返回值是BaseType_t,实际它是long类型,可以在portmacro.h文件中看到其定义:
复制typedef long BaseType_t;另外,任务句柄的类型为TaskHandle_t,实际它是void *类型,可以在task.h文件中看到其定义:
复制typedef void * TaskHandle_t;注:xTaskCreate()是一种动态创建任务的方式,系统通过heap_4.c的配置为任务自动分配相关内存,还有一种静态创建任务的方式xTaskCreateStatic(),这里先不介绍。
任务删除 vTaskDelete()
函数原型(tasks.c中):
复制void vTaskDelete( TaskHandle_t xTaskToDelete )参数:
xTaskToDelete:要删除的任务的任务句柄
注:通过 xTaskCreate()动态创建的任务,在使用vTaskDelete()删除后,该任务创建时申请的堆栈和内存会在系统的空闲任务中被释放掉。
任务调度 vTaskStartScheduler()
函数原型(tasks.c中):
复制void vTaskStartScheduler( void )不需要参数,开启后就由FreeRTOS开始任务调度工作。
程序设计
主函数
主函数还是我们熟悉的main函数,但FreeRTOS里的main函数不需要自己设计成死循环,只需要创建任务并开启任务调度,即可使系统持续运行。
任务的创建一般都是先创建一个开始任务,然后开始任务再负责创建其它子任务。
复制int main(void) { //设置系统中断优先级分组4(FreeRTOS中的默认方式!) NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); //初始化LED端口 LED_Init(); //创建开始任务 xTaskCreate((TaskFunction_t )start_task, //任务函数 (const char* )”start_task”, //任务名称 (uint16_t )START_STK_SIZE, //任务堆栈大小 (void* )NULL, //传递给任务函数的参数 (UBaseType_t )START_TASK_PRIO, //任务优先级 (TaskHandle_t* )&StartTask_Handler); //任务句柄 //开启任务调度 vTaskStartScheduler(); }开始任务函数
开始任务函数的功能就是用来创建其它的子任务,创建完之后会把自己删除掉。
复制//开始任务任务函数 void start_task(void *pvParameters) { taskENTER_CRITICAL(); //进入临界区 //创建TASK1任务 xTaskCreate((TaskFunction_t )task1_task, (const char* )”task1_task”, (uint16_t )TASK1_STK_SIZE, (void* )NULL, (UBaseType_t )TASK1_TASK_PRIO, (TaskHandle_t* )&Task1Task_Handler); //创建TASK2任务 xTaskCreate((TaskFunction_t )task2_task, (const char* )”task2_task”, (uint16_t )TASK2_STK_SIZE, (void* )NULL, (UBaseType_t )TASK2_TASK_PRIO, (TaskHandle_t* )&Task2Task_Handler); vTaskDelete(StartTask_Handler); //删除开始任务 taskEXIT_CRITICAL(); //退出临界区 }两个任务函数
每个任务函数都是一个死循环,注意循环中必须添加vTaskDelay()延时函数,用于任务的切换。
复制//task1任务函数 void task1_task(void *pvParameters) { while(1) { LEDa_Toggle; vTaskDelay(500); //延时500ms } } //task2任务函数 void task2_task(void *pvParameters) { while(1) { LEDb_ON; vTaskDelay(200); //延时200ms LEDb_OFF; vTaskDelay(800); //延时800ms } }main.c所有程序
复制#include “stm32f4xx.h” #include “led.h” #include “FreeRTOS.h” #include “task.h” //任务参数————————– //优先级 堆栈大小 任务句柄 任务函数 #define START_TASK_PRIO 1 #define START_STK_SIZE 128 TaskHandle_t StartTask_Handler; void start_task(void *pvParameters); #define TASK1_TASK_PRIO 2 #define TASK1_STK_SIZE 128 TaskHandle_t Task1Task_Handler; void task1_task(void *pvParameters); #define TASK2_TASK_PRIO 3 #define TASK2_STK_SIZE 128 TaskHandle_t Task2Task_Handler; void task2_task(void *pvParameters); int main(void) { //设置系统中断优先级分组4(FreeRTOS中的默认方式!) NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); //初始化LED端口 LED_Init(); //创建开始任务 xTaskCreate((TaskFunction_t )start_task, //任务函数 (const char* )”start_task”, //任务名称 (uint16_t )START_STK_SIZE, //任务堆栈大小 (void* )NULL, //传递给任务函数的参数 (UBaseType_t )START_TASK_PRIO, //任务优先级 (TaskHandle_t* )&StartTask_Handler); //任务句柄 //开启任务调度 vTaskStartScheduler(); } //开始任务任务函数 void start_task(void *pvParameters) { taskENTER_CRITICAL(); //进入临界区 //创建TASK1任务 xTaskCreate((TaskFunction_t )task1_task, (const char* )”task1_task”, (uint16_t )TASK1_STK_SIZE, (void* )NULL, (UBaseType_t )TASK1_TASK_PRIO, (TaskHandle_t* )&Task1Task_Handler); //创建TASK2任务 xTaskCreate((TaskFunction_t )task2_task, (const char* )”task2_task”, (uint16_t )TASK2_STK_SIZE, (void* )NULL, (UBaseType_t )TASK2_TASK_PRIO, (TaskHandle_t* )&Task2Task_Handler); vTaskDelete(StartTask_Handler); //删除开始任务 taskEXIT_CRITICAL(); //退出临界区 } //task1任务函数 void task1_task(void *pvParameters) { while(1) { LEDa_Toggle; vTaskDelay(500); //延时500ms } } //task2任务函数 void task2_task(void *pvParameters) { while(1) { LEDb_ON; vTaskDelay(200); //延时200ms LEDb_OFF; vTaskDelay(800); //延时800ms } }运行结果
运行效果是板子上的两个LED按照各自任务函数中设定的亮灭时间不断闪烁。
使用系统的原因就是可以让两个任务看起来像是同时运行
,试想,如果是裸机系统,虽然也可以实现同样功能(这两个LED任务的闪烁规律比较简单),但需要将两个任务结合起来管理亮灭时间,两个任务就纠缠在一起了,如果是两个更复杂的任务,裸机系统可能就无法实现了。
审核编辑:汤梓红免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:FreeRTOS介绍与基础任务创建-freertos的作用 https://www.yhzz.com.cn/a/7314.html