电子发烧友网报道(文/莫婷婷)自动驾驶技术成为智能汽车的竞争焦点。百度集团资深副总裁、智能驾驶事业群组总经理李震宇曾提到,到2030年没有自动驾驶能力的电动汽车将完全失去竞争力。只不过,当下自动驾驶汽车还处于商业化落地的过程,并且消费者对自动驾驶汽车还存在顾虑。
那么,自动驾驶汽车快速商业化落地还面临哪些挑战,5G技术的商用、更高阶的传感器技术、V2X能否实现自动驾驶,自动驾驶技术路线又有哪些变化呢?
L3向L4过渡,自动驾驶汽车商业化落地持续“破冰”
什么样的自动驾驶才属于真正实现商业化落地?业内普遍认为,没有安全员,或者允许驾驶员在车内睡觉时,才算真正实现商业化落地。现阶段的自动驾驶还处于低级自动驾驶阶段,也就是L3,不具有商业价值,并且要求驾驶员或安全员必须根据系统请求及时接管车辆,或者预测危险时主动接管车辆。而大部分乘用车还处于人机共同驾驶阶段,也就是L2。只有到了L4才是高级自动驾驶阶段,允许没有安全员,或者驾驶员可以在车内睡觉。
深圳交通中心和深圳市智能网联交通系统产业创新中心专业总工程师段进宇指出,L3的要求是非常高的,它需要传统驾驶技术和自动驾驶技术同时并存在一辆车上,而且要求传统的驾驶技术和自动驾驶技术能够随时切换。由此来看,L3处于一个较为尴尬的自动驾驶发展阶段。
随着技术的发展和市场需求的增加,业内人士开始讨论自动驾驶技术、L3有没有办法向前推进,为什么“传统的驾驶技术和自动驾驶技术能够随时切换”是L3向L4过渡时最大的挑战之一?
从理论上来看,是因为现在的AI技术就像一个偏科生,必须依赖大量的数据学习,不具有触类旁通的能力,这就带来了长尾问题。一开始可以学得很快,但随着难度越来越高,想要取得突破也就越来越难。在AI技术的局限下,智能汽车在驾驶过程中就会出现“不可预见风险”。段进宇表示,智能汽车需要进行感知、认知、网联、决策、控制、集成与测评等测试验证。但是AI技术存在的问题,意味着自动驾驶汽车真正上路前无法完成全部的测试验证。
由于技术成熟度的原因,L3及以上的自动驾驶系统需要进行接管,也就是驾驶员进行干预修正接管。深圳交通中心和深圳市智能网联交通系统产业创新中心的数据显示,在接管类型方面深圳道路测试自动驾驶脱离接管主要由外部环境影响及人为主动干预导致,占比分别为62%、25%,而车辆本身技术原因也占有13%的比例。
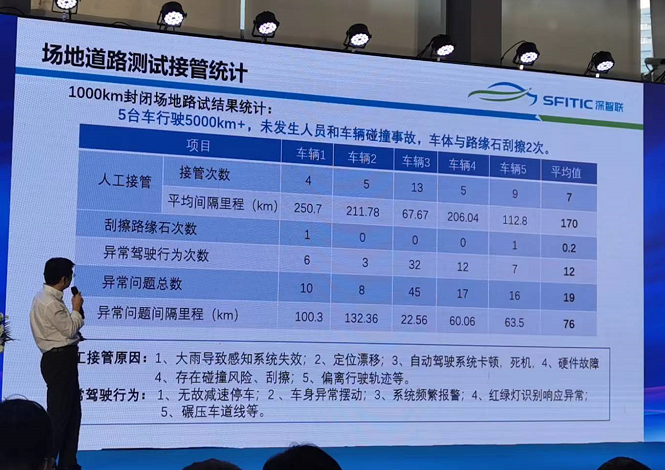
细分来看车辆本身技术原因中,主要有定位及网络通信故障,感知识别出错,车辆刹车、驻车故障,以及决策算法缺陷。而这些都需要车载芯片、传感器、车联网技术、算法的配合。
为什么自动驾驶汽车无法实现商业化落地,段进宇总结了两点。一是不安全。基于单车智能的自动驾驶汽车感知能力和认知能力有限,无法适应多变的气候和复杂的交通环境;人工智能决策没有自我经验和积累能力,应对复杂、动态、不确定的处理能力仍需验证;自动驾驶技术要想达到人类驾驶水平还需要大量的数据喂养和算法训练。二是效率低、成本高。不管是高速路段还是市区,自动驾驶汽车都需要安全员做好接管准备以保障行驶安全;安全员、自动计时系统软硬件都是需要考虑的成本。
目前深圳已经累计开放测试道路超过201公里,累计测试里程超94万里,企业包括小马智行、文远知行、元戎启行、AutoX等,其中元戎启行在深圳、北京都设有研发中心,和东风汽车、曹操出行等企业在全国多地开展自动驾驶相关合作,进行道路测试和试运营。今年4月,元戎启行的L4级自动驾驶前装方案车队落地深圳。
在自动驾驶汽车实现商用,或者说是从L3真正转向L4时,还需要有大量的道路测试,而这个过渡时间还得由自动驾驶技术的成熟度决定。
从单车智能到V2X,车云端一体化成为下一阶段的突破方向
在很长一段时间里,为了让自动驾驶真正实现落地,单车智能和车路协同曾在业内掀起PK热潮。单车智能是通过传感器的感知和高效算法决策的单车智能模式,尽管智能汽车上安装了摄像头、激光雷达、毫米波雷达等传感器,但是难以解决单车视角有限,视野盲区、全局管理等问题。
因此车路协同自动驾驶技术路线(V2X)被认为是单车智能的延伸。V2X基于道路基站实现和车辆通信,并且能够将智能汽车的运动决策和交通的调控系统协同。车路协同一方面把部分车端的各种智能系统转移到路端,更便于监管,并且可以提供“上帝视角”。这里的“上帝视角”指的是传感器能看到的路况,驾驶员在车里只能看到一些东西,但是路侧的各种传感器能看到的东西比驾驶员看到的还要多。
在车路协同的技术路线中,路侧的感知、决策、控制主要靠路侧设备、边缘计算,可以降低车端对车载平台的算力需求。例如对路口红绿灯的识别及响应,可以用信号机发射它的状态,也就是车路通信(V2I)设备与智能汽车进行通讯,而不是通过摄像头感知红绿灯,可以提高识别率,并且减少交通路段的光照变化多端等环境问题带来的影响,提高通过交叉路口的安全性。
V2X是现阶段的最佳路线,但是与人相比却还是有一定差距的。深智联曾做过一组红绿灯时延测试,测试结果显示红绿灯信号平均时延仅为1.1s。但是这个数据是远高于车内驾驶员的0.2~0.5s。
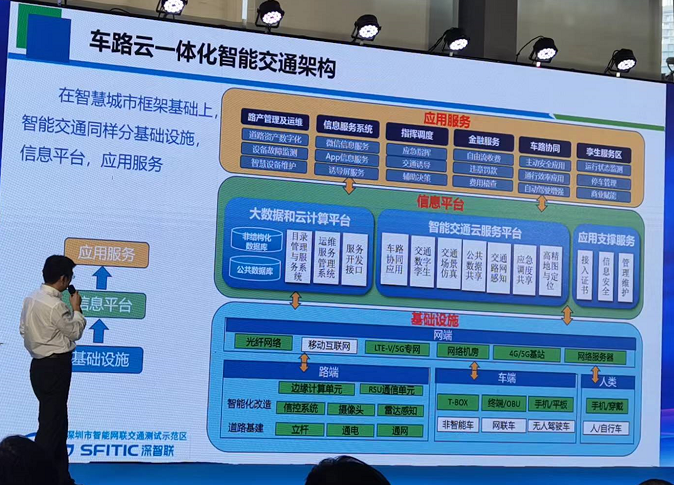
未来,如果要实现更高阶的自动驾驶,还得实现从车端,到路端,再到云端的高度协同,这是最理想的自动驾驶模式。其中车端智能包括4G/5G接入模块、传感器、高精度定位设备、感知探头、车载智能中控系统、疲劳测试等,路侧智能包括无线接入、计算平台、AI、大数据等配合,云端智能则需要大容量有线网络接入、汽车云数据平台,并且要求进行海量数据挖掘、模型训练、智能决策等。
只不过段进宇也表示,如果说自动驾驶汽车已经成为成人的大玩具的话,智能网联系统就是极客的大玩具。这里需要面临技术问题,即汽车芯片、传感器等半导体元器件还要进行车规级认证。其中汽车芯片需要通过AEC-Q100 、IATF 16949、ISO26262三种国际标准的认证。目前,国内芯片厂商正在加大对汽车芯片的投入,并且有不少产品进入认证阶段,但真正上车的还不多。除了技术上的问题,还有监管等问题需要解决。而车端、路端、云端就是一个庞杂的系统,可靠性有待考量,性价比也还处在未知状态。
小结:
自动驾驶在面临发展机遇的同时也存在挑战。在技术上,业内人士对自动驾驶的研究仍在进行,从L3到L4,还需要解决大量的技术问题。在自动驾驶的技术路线方面,从单车智能到车路协同,新的技术路线得益于技术的成熟得以应用,作为当下主流的方向,产业链上下游厂商都在朝着相同的方向前进。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:AI技术“偏科”,V2X反应不及人眼?自动驾驶从L3过渡L4面临哪些挑战-自动驾驶ai公司 https://www.yhzz.com.cn/a/6355.html