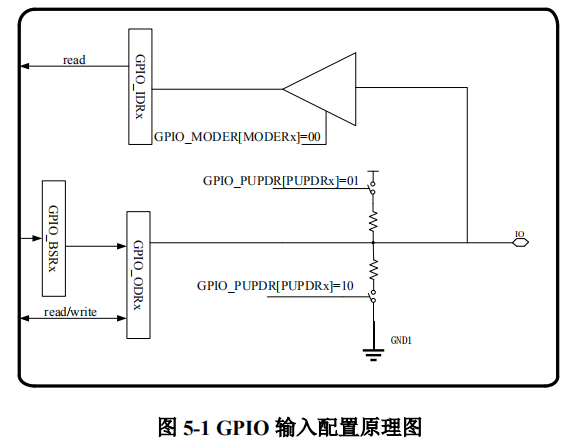
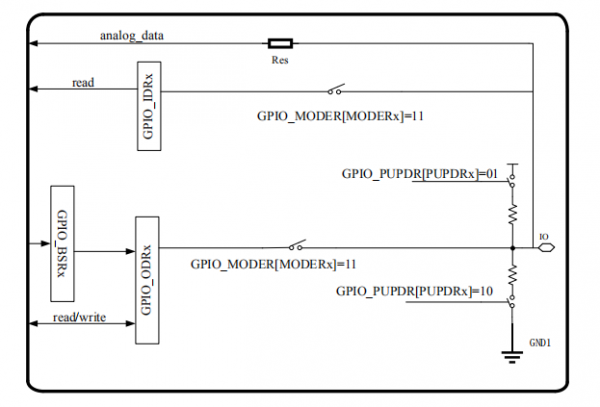
GPIO模拟配置原理图
#define GPIO_MODE_INPUT 0x00000000UL
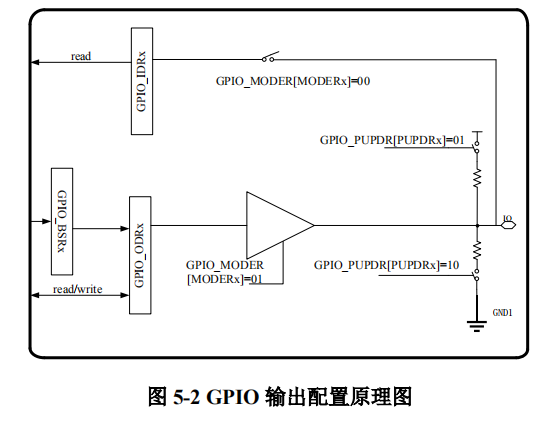
#define GPIO_MODE_OUTPUT 0x00000001UL
#define GPIO_MODE_AF 0x00000002UL
#define GPIO_MODE_ANALOG 0x00000003UL
void GPIO_Toggle(GPIO_TypeDef *GPIOx,uint8_t PINx);//GPIO 翻转
复制代码
2.GPIO其他函数
void GPIO_MODE_Init(GPIO_TypeDef *GPIOx,uint8_t PINx,uint32_t GPIO_MODEx); //GPIO 模式
void GPIO_OutType_Init(GPIO_TypeDef *GPIOx,uint8_t PINx,uint32_t GPIO_OTYPEx); //GPIO 输出模式
void GPIO_InType_Init(GPIO_TypeDef *GPIOx,uint8_t PINx,uint32_t GPIO_ITYPEx); //GPIO 输入模式
void GPIO_PULL_Init(GPIO_TypeDef *GPIOx,uint8_t PINx,uint32_t GPIO_PULLx); //GPIO 上拉
void GPIO_OutSpeed_Init(GPIO_TypeDef *GPIOx,uint8_t PINx,uint32_t GPIO_SPEEDx); //GPIO 压摆率
void GPIO_AF_Init(GPIO_TypeDef *GPIOx,uint8_t PINx,uint32_t GPIO_AFx); //GPIO 复用模式
void GPIO_EXIT_MODE_Init(GPIO_TypeDef *GPIOx,uint8_t PINx,uint32_t GPIO_EXIT_MODEx); //GPIO 中断模式
void GPIO_INTER_enable(GPIO_TypeDef *GPIOx,uint8_t PINx); //GPIO 中断使能
void GPIO_INTER_disable(GPIO_TypeDef *GPIOx,uint8_t PINx); //GPIO 中断关闭
void GPIO_Write(GPIO_TypeDef *GPIOx,uint8_t PINx,uint32_t GPIO_PinState); //GPIO 输出
uint8_t GPIO_Read(GPIO_TypeDef *GPIOx,uint8_t PINx); //GPIO 读输入
void GPIO_Toggle(GPIO_TypeDef *GPIOx,uint8_t PINx);//GPIO 翻转
void GPIO_EXIT_Init_case1(GPIO_TypeDef *GPIOx, uint8_t PINx); //检测高电平
void GPIO_EXIT_Init_case2(GPIO_TypeDef *GPIOx, uint8_t PINx); //检测低电平
void GPIO_EXIT_Init_case3(GPIO_TypeDef *GPIOx, uint8_t PINx); //检测上升沿
void GPIO_EXIT_Init_case4(GPIO_TypeDef *GPIOx, uint8_t PINx); //检测下降沿
void EXIT0_IRQHandler(void) __attribute__((interrupt(“SiFive-CLIC-preemptible”)));
void EXIT1_IRQHandler(void) __attribute__((interrupt(“SiFive-CLIC-preemptible”)));
void EXIT2_IRQHandler(void) __attribute__((interrupt(“SiFive-CLIC-preemptible”)));
void EXIT3_IRQHandler(void) __attribute__((interrupt(“SiFive-CLIC-preemptible”)));
void EXIT4_IRQHandler(void) __attribute__((interrupt(“SiFive-CLIC-preemptible”)));
void EXIT9_5_IRQHandler(void) __attribute__((interrupt(“SiFive-CLIC-preemptible”)));
void EXIT15_10_IRQHandler(void) __attribute__((interrupt(“SiFive-CLIC-preemptible”)));
void CAW_IRQhandler(void) __attribute__((interrupt(“SiFive-CLIC-preemptible”)));//载波检测中断函数
void CAW_Init(void);//载波检测配置
复制代码
3.修改DEMO里的程序
查看建立的模板程序,在里面找到Chapter 5 GPIO Test Init的代码段,将第一句修改如下,设置PA8引脚的GPIO模式
///—-Chapter 5 GPIO Test Init—————————————–
GPIO_MODE_Init(GPIOA,PIN8,GPIO_MODE_OUTPUT); //GPIO 模式
复制代码
修改PA8引脚电平翻转程序,实现100ms电平翻转
for(uint8_t i=0;i<10;i++)
{
GPIO_Toggle(GPIOA,PIN8); //GPIO 翻转
Delay32M_ms(100);
}
复制代码
修改主程序里while循环电平翻转程序,实现500ms电平翻转
while(1)
{
Delay32M_ms(500);
GPIO_Toggle(GPIOA,PIN8);
}
复制代码
按下Ctrl+F9,完成程序编译完成的程序在工程文件的default文件夹里的elf文件。
四、烧录程序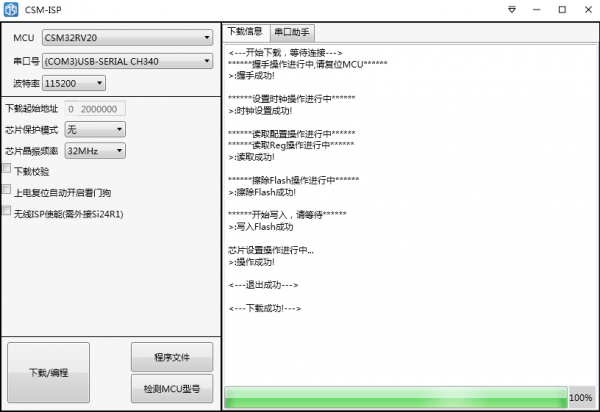

使用CSM-ISP烧录程序, 同样在这条链接里面就可以找到相关介绍:https://mp.weixin.qq.com/s/El8-GMhWRSGGQWrMXCVcBA
五、总结
本次建立工程,很是顺利,代码风格跟STM32的HAL库比较像,上手很快,后续再对其他外设进行使用,完成项目设计。
出厂程序效果(开发板体验视频,详见作者原文链接内容)