概述
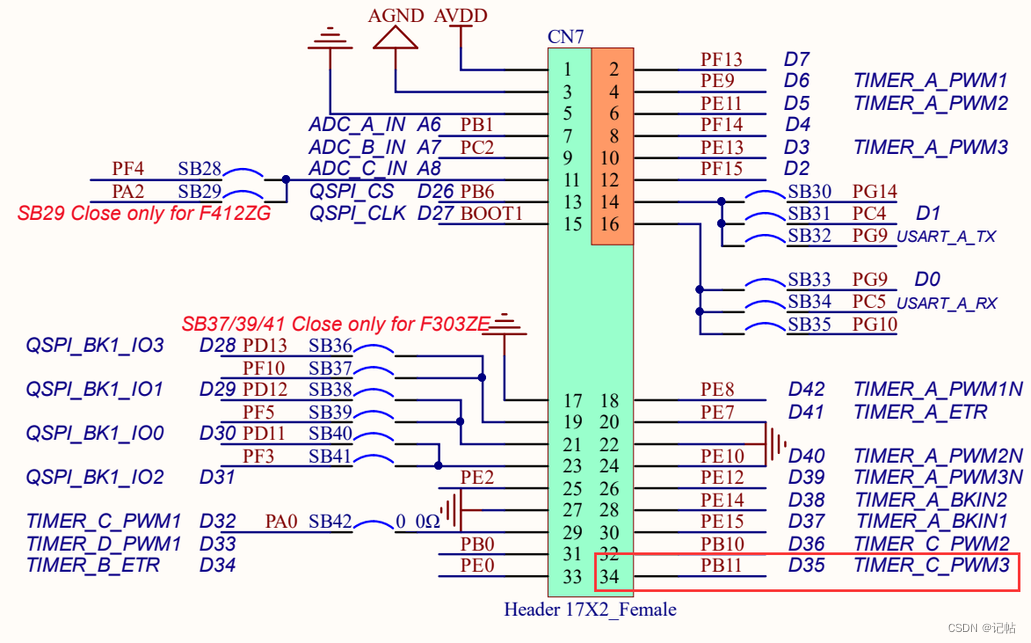
本章配置GD32F303输出PWM,同时使用TIM测量PWM频率和正占空比。 查阅手册可以得知,PB11为定时器1的通道3,让其输出PWM,PA6为定时器2的通道0,让作为TIM定时器输入。 需要GD样片的可以加群申请:615061293 。


这里准备了自己绘制的开发板进行验证。
管脚图如下所示。
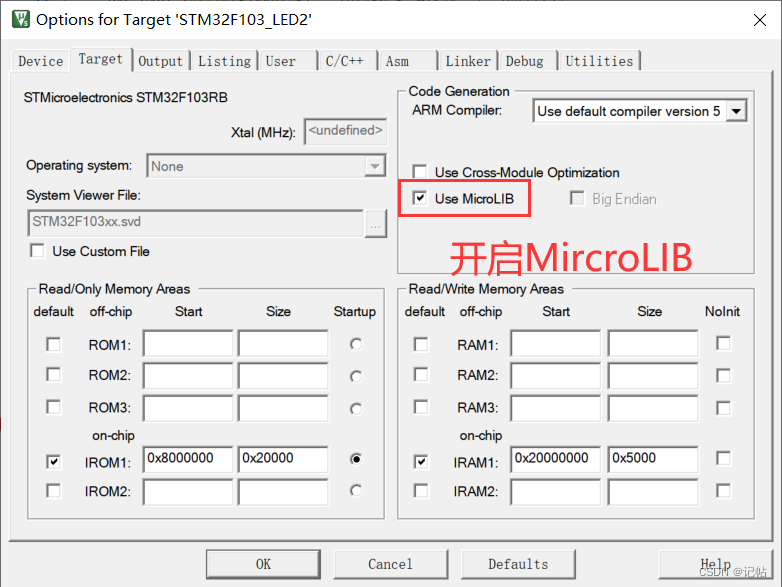
microlib 进行了高度优化以使代码变得很小。 它的功能比缺省 C 库少,并且根本不具备某些 ISO C 特性。 某些库函数的运行速度也比较慢,如果要使用printf(),必须开启。
串口重定向后就可以使用printf进行打印。
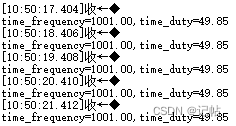
占空比与频率计算占空比=(t1-t0)/(t2-t0) 频率=(t2-t0)/时钟频率= =(t2-t0)/(120M/(psc+1))
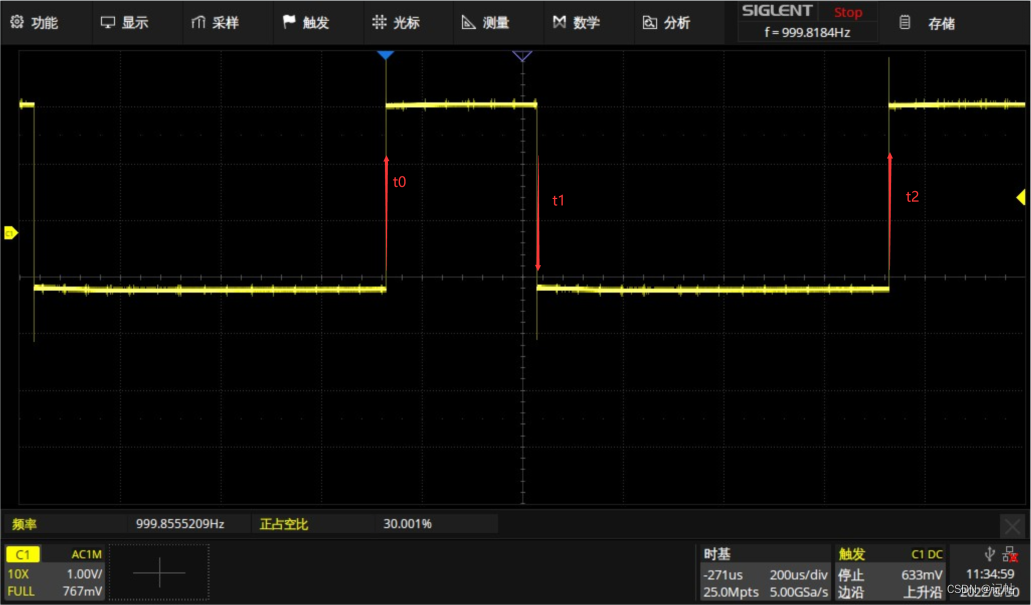
周期需要2个上升沿去判断,设定第一个上升沿time_flag由0->1,下降沿time_dowm_flag由0->1,此时就知道正占空比时间,当在产生上升沿时候,就可以计算出周期使用的时间。

PWM频率计算如下所示。

当输出1k频率,50%正占空比。
审核编辑:汤梓红
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:GD32F303固件库开发(13)—-定时器TIM捕获PWM测量频率与占空比-gpio定时器 https://www.yhzz.com.cn/a/5987.html