MAX22007为可配置模拟输出器件。它支持4个通道,每个通道可单独编程为0V至+10V电压输出或0mA至+20mA电流输出。
微控制器兼容型串行外设接口(SPI)提供对许多高级功能的访问。本应用笔记提供了在微控制器中实现设置、监控和诊断功能的C代码示例。
介绍
MAX22007集成了4个12位DAC(数模转换器),可创建4个通道,输出为软件可配置,支持0V至+10V或0mA至+20mA模拟输出。每个通道还可以检测负载阻抗,并确定负载是电压还是电流输入。
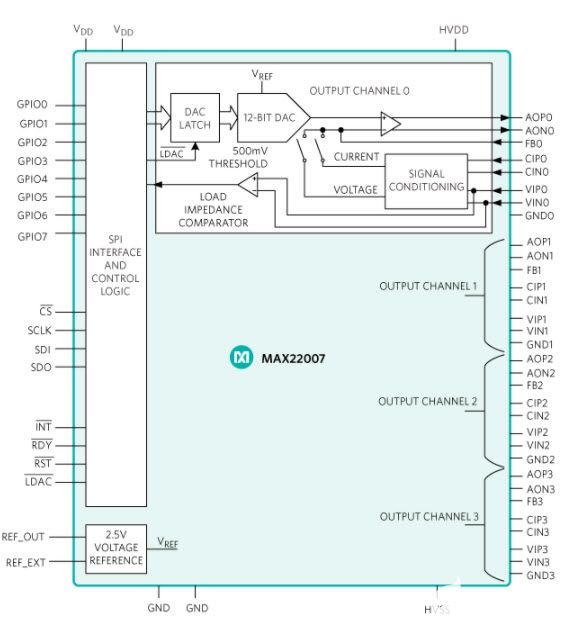
图1.MAX22007功能框图
本应用笔记阐述了一系列功能,以便对MAX22007进行更快、更成熟的编程。这些功能是用C语言编写的,很容易移植到任何常见的微控制器。请参考MAX22007数据资料,了解MAX22007引脚、工作模式和控制寄存器的详细信息。
MAX22007 SPI
MAX22007串行外设接口(SPI)命令为24位(8位指令+16位数据),CRC禁用时为24位,CRC启用时为32位。表 1 显示了 SPI 命令结构。MAX22007的SPI模式为CPOL = 0 (CLK空闲 = 0)和CPHA = 0 (上升沿/第一沿对数据进行采样)。数据/命令必须首先以最高有效字节 (MSB) 计时。
地址 控制 数据 7 位 A[6:0],MSB 至最低有效字节 (LSB) R/W 位,读取 = 1,写入 = 0 16 位 D[15:0],MSB 至 LSBMAX22007数据资料详细介绍了SPI读写周期、寄存器表和指令。
图1所示为MAX22007的主要功能块。有四个通道可以单独编程为电压或电流输出,以及一个带有SPI端口的控制逻辑,用于访问所有寄存器和硬件标志以进行诊断。
MAX22007支持8路逻辑电平GPIO(通用输入/输出),以简化需要电流隔离的系统。GPIO可以控制外部组件,如多路复用器、FET(场效应晶体管)或使能切换电源,或通过隔离栅回读数字信号。该器件还支持菊花链模式,这也减少了隔离设计所需的IO引脚数量。
源代码
本应用笔记提供C源代码示例,提供驱动器功能,用于访问MAX22007中的多个寄存器,以实现配置、控制和诊断功能。
请注意,配置寄存器 0x03 LD_CNFG[3:0](位 15 至 12)在上电时设置为 0。所有四个输出在LDAC引脚上发生高低转换时同时更新。如果通道要求透明并立即更新,请将LD_CNFG位设置为 1。
用于通道/模式选择的全局变量
public enum Register_address { // All Registers REVISION_ID = 0x00, STATUS_INTERRUPTS = 0x01, INTERRUPT_ENABLE = 0x02, CONFIGURATION = 0x03, CONTROL = 0x04, CHANNEL_MODE = 0x05, SOFT_RESET = 0x06, CHANNEL0_DATA = 0x07, CHANNEL1_DATA = 0x08, CHANNEL2_DATA = 0x09, CHANNEL3_DATA = 0x0a, GPIO_CONTROL = 0x0b, GPIO_DATA = 0x0c, GPI_EDGE_CTRL = 0x0d, GPI_EDGE_STATUS = 0x0e, }; public enum AOut_Mode { high_impedance = 0, AO_12V = 1, AO_25mA = 2, out_of_range1 = 3, }; //******************************************************************** //* //* Function: MAX22007_read_register //* Description: Read one Register from MAX22007 //* //* Input: Register-Address (take from definitions in header-file) //* Output: 16bit register content //* //* if CRC is enabled, then crc8-Command is required //* //********************************************************************/ public UInt32 MAX22007EVKIT_read_register(Register_address address) { if (CRC_Enabled == false) { max22007_port.SPI_CS0Enable(); max22007_port.SPI_W_transaction_8( (ushort) ( ((byte)address << 1) + 0x01 ) ); result = max22007_port.SPI_R_transaction_16(); max22007_port.SPI_CS0Disable(); } else { max22007_port.SPI_CS0Enable(); max22007_port.SPI_W_transaction_8( (ushort) ( ((byte)address << 1) + 0x01 ) ); result = max22007_port.SPI_R_transaction_16(); max22007_port.SPI_CS0Disable(); CRC_result = max22007_port.SPI_R_transaction_8(); // read the CRC byte CRC_TX1 = (address << 1) + 0x01; byte CRC_RX1 = ((result >> 8) & 0xff); byte CRC_RX2 = ((result ) & 0xff); byte CRC_Calc = crc8(CRC_TX1, CRC_RX1, CRC_RX2); if (CRC_Calc != CRC_result) { result = 0xfffffffe; // return a 32 bit value to flag an error } } } //******************************************************************** //* //* Function: MAX22007_write_register //* Description: Write one Register to MAX22007 //* //* Input: Register-Address (take from definitions in header-file) //* 16bit data (new register content) //* //********************************************************************/ public void MAX22007EVKIT_write_register(Register_address address, UInt16 data) { byte CRC_TX1 = (byte)((byte)address << 1); if (CRC_Enabled == false) { max22007_port.SPI_CS0Enable(); max22007_port.SPI_W_transaction_8( (ushort) ( ((byte)address << 1) ) ); max22007_port.SPI_W_transaction_16(data); max22007_port.SPI_CS0Disable(); } else { byte CRC_TX2 = (byte)((data>> 8) & 0xff); byte CRC_TX3 = (byte)( data & 0xff); byte CRC_Calc = crc8(CRC_TX1, CRC_TX2, CRC_TX3); max22007_port.SPI_CS0Enable(); max22007_port.SPI_W_transaction_8( (ushort) ( ((byte)address << 1) ) ); max22007_port.SPI_W_transaction_16(data); max22007_port.SPI_W_transaction_8( CRC_Calc ); max22007_port.SPI_CS0Disable(); } } // ******************************************************************** // // Function: MAX22007_Mode_Set // Description: Sets up MAX22007 Mode for one of the 4 Channels // // Input: mode: Desired Mode // Channel: Desired Channel // Output: None (The selected channel of MAX22007 will be setup by this routine) // // ******************************************************************** private void MAX22007_Mode_Set(byte Channel, AOut_Mode mode) { // Set AO Mode (Register 0x05: CHANNEL_MODE) UInt32 previous_mode = MAX22007EVKIT_read_register(Register_address.CHANNEL_MODE); UInt16 new_mode = (UInt16) previous_mode; switch (Channel) { case 0: if (mode == AOut_Mode.high_impedance) { new_mode = (new_mode & 0xeeff); // High-Impedance, set to Voltage Mode and Power-Off – Channel 0 } if (mode == AOut_Mode.AO_12V) { new_mode = (new_mode & 0xefff); // Voltage Output, set CHNL_MODE to 1 for this Channel 0 new_mode = (new_mode | 0x0100); // make sure the Channel is enabled Channel 0 } if (mode == AOut_Mode.AO_25mA) { new_mode = (new_mode | 0x1000); // Current Output, set CHNL_MODE to 1 for this Channel 0 new_mode = (new_mode | 0x0100); // make sure the Channel is enabled Channel 0 } break; case 1: if (mode == AOut_Mode.high_impedance) { new_mode = (new_mode & 0xddff); // High-Impedance, set to Voltage Mode and Power-Off – Channel 1 } if (mode == AOut_Mode.AO_12V) { new_mode = (new_mode & 0xdfff); // Voltage Output, set CHNL_MODE to 1 for this Channel 1 new_mode = (new_mode | 0x0200); // make sure the Channel is enabled Channel 1 } if (mode == AOut_Mode.AO_25mA) { new_mode = (new_mode | 0x2000); // Current Output, set CHNL_MODE to 1 for this Channel 1 new_mode = (new_mode | 0x0200); // make sure the Channel is enabled Channel 1 } break; case 2: if (mode == AOut_Mode.high_impedance) { new_mode = (new_mode & 0xbbff); // High-Impedance, set to Voltage Mode and Power-Off – Channel 2 } if (mode == AOut_Mode.AO_12V) { new_mode = (new_mode & 0xbfff); // Voltage Output, set CHNL_MODE to 1 for this Channel 2 new_mode = (new_mode | 0x0400); // make sure the Channel is enabled Channel 2 } if (mode == AOut_Mode.AO_25mA) { new_mode = (new_mode | 0x4000); // Current Output, set CHNL_MODE to 1 for this Channel 2 new_mode = (new_mode | 0x0400); // make sure the Channel is enabled Channel 2 } break; case 3: if (mode == AOut_Mode.high_impedance) { new_mode = (new_mode & 0x77ff); // High-Impedance, set to Voltage Mode and Power-Off – Channel 3 } if (mode == AOut_Mode.AO_12V) { new_mode = (new_mode & 0x7fff); // Voltage Output, set CHNL_MODE to 1 for this Channel 3 new_mode = (new_mode | 0x0800); // make sure the Channel is enabled Channel 3 } if (mode == AOut_Mode.AO_25mA) { new_mode = (new_mode | 0x8000); // Current Output, set CHNL_MODE to 1 for this Channel 3 new_mode = (new_mode | 0x0800); // make sure the Channel is enabled Channel 3 } break; } MAX22007EVKIT_write_register(Register_address.CHANNEL_MODE, new_mode); } // ******************************************************************** // // Function: MAX22007_convert_Voltage_to_LSB // Description: Converts a voltage to an LSB value for the DAC // // Input: float: Voltage // Output: UInt16 LSB Value for the DAC // // ******************************************************************** private UInt16 MAX22007_convert_Voltage_to_LSB (float voltage) { UInt16 new_hex_value = 0; float result = 0; float phy_AO_12V_factor = (float) 12.5 / (float) 4095; // check for errors if (voltage > 12.5) { return 0xfffe; } // return out of range value to highlight there was an error if (voltage < 0) { return 0xfffe; } // return out of range value to highlight there was an error // convert voltage to LSB value result = (voltage / phy_AO_12V_factor); new_hex_value = (UInt16) result; return new_hex_value; } // ******************************************************************** // // Function: MAX22007_convert_Current_to_LSB // Description: Converts a current in mA to an LSB value for the DAC // // Input: float: Current in mA // Output: UInt16 LSB Value for the DAC // // ******************************************************************** private UInt16 MAX22007_convert_Current_to_LSB (float current_mA) { UInt16 new_hex_value = 0; float result = 0; float phy_AO_25mA_factor = (float) 25 / (float) 4095; // check for errors if (current_mA > 25) { return 0xfffe; } // return out of range value to highlight there was an error if (current_mA < 0) { return 0xfffe; } // return out of range value to highlight there was an error // convert voltage to LSB value result = (current_mA / phy_AO_25mA_factor); new_hex_value = (UInt16) result; return new_hex_value; } // ******************************************************************** // // Function: MAX22007_DAC_Set_LSB // Description: Writes a new LSB value to the DAC, // assuming it is already setup in a specific mode, use DAC_Setup first // If LDAC-pin is high, it must be toggled after setting up update the output // // Input: new DAC value in LSB // Output: None // // ******************************************************************** private void MAX22007_Set_DAC(byte Channel, UInt16 LSB_code) { UInt16 DAC_out_register = (UInt16) (LSB_code << 4); // Shift bits to match with register switch (Channel) { case 0: MAX22007EVKIT_write_register (Register_address.CHANNEL0_DATA, DAC_out_register); // Write AO Data register CH0 break; case 1: MAX22007EVKIT_write_register (Register_address.CHANNEL1_DATA, DAC_out_register); // Write AO Data register CH1 break; case 2: MAX22007EVKIT_write_register (Register_address.CHANNEL2_DATA, DAC_out_register); // Write AO Data register CH2 break; case 3: MAX22007EVKIT_write_register (Register_address.CHANNEL3_DATA, DAC_out_register); // Write AO Data register CH3 break; } } // ******************************************************************** // // Function: main // Description: The follwoing function would setup: // 1. ALL outputs to immediately update on write // 2. Channel 0 in Voltage mode and drive 5V // 3. Channel 1 in Current mode and drive 10mA // // Input: float: Current in mA // Output: UInt16 LSB Value for the DAC // // ******************************************************************** private void setup_main () { MAX22007EVKIT_write_register (Register_address.CONFIGURATION, 0xf000); // Set all Latch bits MAX22007_Mode_Set(0, AOut_Mode.AO_12V); // setup Channel 0 to Voltage Mode MAX22007_Mode_Set(1, AOut_Mode.AO_25mA); // setup Channel 1 to Current Mode UInt16 DAC_LSB_value = 0; DAC_LSB_value = MAX22007_convert_Voltage_to_LSB ((float) 5.0); // get integer value for 5.0 Volt MAX22007_Set_DAC(0, DAC_LSB_value); // write this 5V value to Channel 0 DAC_LSB_value = MAX22007_convert_Current_to_LSB ((float)10.0); // get integer value for 10.0 mA MAX22007_Set_DAC(1, DAC_LSB_value); // write this 10.0mA value to Channel 1 } // ******************************************************************** // // Function: MAX22007_GPIO_Setup // Description: Sets up all 8 GPIO Pins, bit0=GPIO0, bit1=GPIO1, … // Since the command includes everything Enable/Disable as well as // GPIO Direction, this function is faster than GPO_Set // because it does not have to read back the setup from the part // // Input: GPIO_enable (byte) Bit0 = GPIO0, Bit1 = GPIO1, … (0 = Off, 1 = On) // GPIO_direction (byte) Bit0 = GPIO0, Bit1 = GPIO1, … (0 = Input, 1 = Output) // // Output: None // // ******************************************************************** void MAX22007_GPIO_Setup (byte GPIO_enable, byte GPIO_direction) { UInt16 new_gpio_value = (UInt16) ( ( (GPIO_enable & 0xff) << 8) + ( (GPIO_direction & 0xff) ) ); MAX22007EVKIT_write_register(Register_address.GPIO_CONTROL, new_gpio_value); } // ******************************************************************** // // Function: MAX22007_GPO_Set // Description: Sets GPOs high or low, bit0=GPIO0, bit1=GPIO1, … // GPOs must be setup and enabled prior this use MAX22007_GPO_Set // // Input: GPO Setting, bit0=GPIO0, bit1=GPIO1, … (0 = Low, 1 = High) // Output: None // // ******************************************************************** void MAX22007_GPO_Set (byte GPO_Setting) { UInt16 GPO_data = (UInt16) ((GPO_Setting<<8) & 0xff00); // Shift bits for GPO MAX22007EVKIT_write_register(Register_address.GPIO_DATA, GPO_Setting); // Write new GPO settings // Inputs are read only, no need to // worry about writing these bits } // ******************************************************************** // // Function: MAX22007_GPI_Get // Description: Gets all GPI readings high or low, bit0=GPIO0, bit1=GPIO1, … // GPIs must be setup and enabled prior this use MAX22007_GPI_Get // // Input: None // Output: GPI Setting, bit0=GPIO0, bit1=GPIO1, … (0 = Low, 1 = High) // // ******************************************************************** byte MAX22007_GPI_Get () { UInt32 gpi_result = MAX22007EVKIT_read_register(Register_address.GPIO_DATA); // read GPI Data byte result = (byte) (gpi_result & 0xff); return result; }结直肠功能
AN7072 中更详细地描述了具有 24 位寄存器的器件的 CRC 功能和计算。MAX22007只有16位寄存器。AN7072中的CRC计算与MAX22007的概念相同,但计算结果仅为3个字节,而不是AN7072中描述的4个字节。以下功能可按原样用于MAX22007。
// ******************************************************************** // // Function: MAX22007_crc8 // Description: Calculates CRC for MAX22007 commands (read or write) // // Input: BYTE1: Command byte (register address + R/W bit) // BYTE2: MS-Byte of the register value // BYTE3: LS-Byte of the register value // Output byte: crc8 of Input // -> for write commands send result as the CRC code // -> for read commands compare result to check for errors // // ******************************************************************** public byte MAX22007_crc8(byte BYTE1, byte BYTE2, byte BYTE3) { byte crc8_start = 0x00; byte crc8_poly = 0x8c; // rotated 0x31, which is our polinomial byte crc_result = crc8_start; // BYTE1 for (int i=0; i<8; i++) { if( ( (( BYTE1>>i ) ^ (crc_result) ) & 0x01 ) > 0 ) // IF(XOR(C6;BITAND(D5;2^4)/2^4) { crc_result = (byte) (crc8_poly ^ crc_result>>1 ); } // BITXOR($D$1;BITAND((D5*2);31)) else { crc_result = (byte) (crc_result>>1); } } // BYTE2 for (int i=0; i<8; i++) { if( ( (( BYTE2>>i ) ^ (crc_result) ) & 0x01 ) > 0 ) // IF(XOR(C6;BITAND(D5;2^4)/2^4) { crc_result = (byte) (crc8_poly ^ crc_result>>1 ); } // BITXOR($D$1;BITAND((D5*2);31)) else { crc_result = (byte) (crc_result>>1); } } // BYTE3 for (int i=0; i<8; i++) { if( ( (( BYTE3>>i ) ^ (crc_result) ) & 0x01 ) > 0 ) // IF(XOR(C6;BITAND(D5;2^4)/2^4) { crc_result = (byte) (crc8_poly ^ crc_result>>1 ); } // BITXOR($D$1;BITAND((D5*2);31)) else { crc_result = (byte) (crc_result>>1); } } return crc_result; }结论
本应用笔记介绍了如何针对所有可能的用例对MAX22007进行编程。MAX22007评估板用于测试该代码。本应用笔记中的C代码示例是一种经过验证的解决方案,可在常用微控制器和MAX22007之间快速、轻松地实现接口。
审核编辑:郭婷
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:如何对MAX22007可配置模拟输出进行编程-MAX7219CWG https://www.yhzz.com.cn/a/5168.html