/* USER CODE BEGIN Header */
/**
******************************************************************************
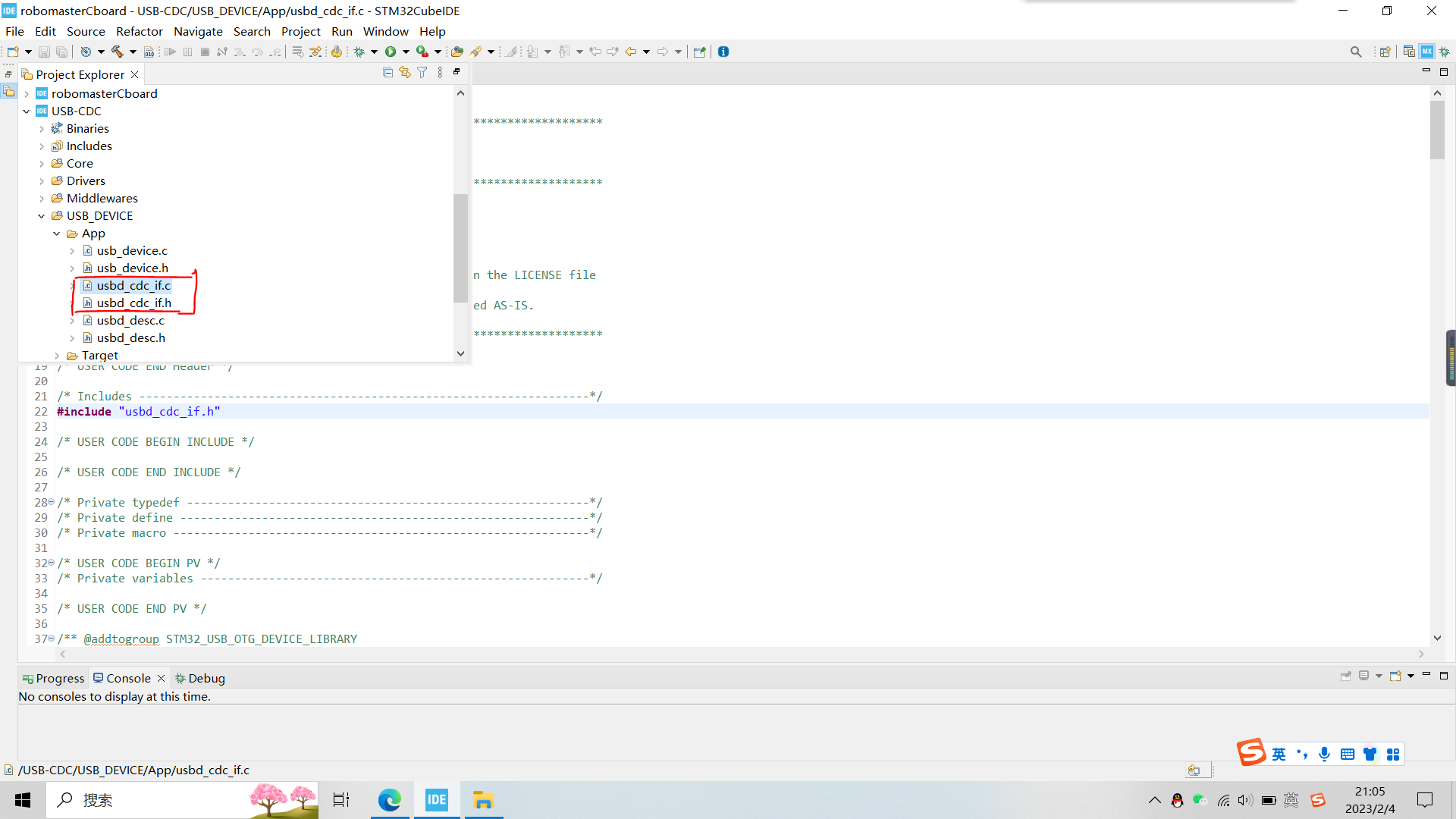
* @file : usbd_cdc_if.c
* @version : v1.0_Cube
* @brief : Usb device for Virtual Com Port.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ——————————————————————*/
#include “usbd_cdc_if.h”
/* USER CODE BEGIN INCLUDE */
/* USER CODE END INCLUDE */
/* Private typedef ———————————————————–*/
/* Private define ————————————————————*/
/* Private macro ————————————————————-*/
/* USER CODE BEGIN PV */
/* Private variables ———————————————————*/
/* USER CODE END PV */
/** @addtogroup STM32_USB_OTG_DEVICE_LIBRARY
* @brief Usb device library.
* @{
*/
/** @addtogroup USBD_CDC_IF
* @{
*/
/** @defgroup USBD_CDC_IF_Private_TypesDefinitions USBD_CDC_IF_Private_TypesDefinitions
* @brief Private types.
* @{
*/
/* USER CODE BEGIN PRIVATE_TYPES */
/* USER CODE END PRIVATE_TYPES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Defines USBD_CDC_IF_Private_Defines
* @brief Private defines.
* @{
*/
/* USER CODE BEGIN PRIVATE_DEFINES */
/* USER CODE END PRIVATE_DEFINES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Macros USBD_CDC_IF_Private_Macros
* @brief Private macros.
* @{
*/
/* USER CODE BEGIN PRIVATE_MACRO */
/* USER CODE END PRIVATE_MACRO */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_Variables USBD_CDC_IF_Private_Variables
* @brief Private variables.
* @{
*/
/* Create buffer for reception and transmission */
/* Its up to user to redefine and/or remove those define */
/** Received data over USB are stored in this buffer */
uint8_t UserRxBufferFS[APP_RX_DATA_SIZE];
/** Data to send over USB CDC are stored in this buffer */
uint8_t UserTxBufferFS[APP_TX_DATA_SIZE];
/* USER CODE BEGIN PRIVATE_VARIABLES */
/* USER CODE END PRIVATE_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Exported_Variables USBD_CDC_IF_Exported_Variables
* @brief Public variables.
* @{
*/
extern USBD_HandleTypeDef hUsbDeviceFS;
/* USER CODE BEGIN EXPORTED_VARIABLES */
/* USER CODE END EXPORTED_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_CDC_IF_Private_FunctionPrototypes USBD_CDC_IF_Private_FunctionPrototypes
* @brief Private functions declaration.
* @{
*/
static int8_t CDC_Init_FS(void);
static int8_t CDC_DeInit_FS(void);
static int8_t CDC_Control_FS(uint8_t cmd, uint8_t* pbuf, uint16_t length);
static int8_t CDC_Receive_FS(uint8_t* pbuf, uint32_t *Len);
static int8_t CDC_TransmitCplt_FS(uint8_t *pbuf, uint32_t *Len, uint8_t epnum);
/* USER CODE BEGIN PRIVATE_FUNCTIONS_DECLARATION */
/* USER CODE END PRIVATE_FUNCTIONS_DECLARATION */
/**
* @}
*/
USBD_CDC_ItfTypeDef USBD_Interface_fops_FS =
{
CDC_Init_FS,
CDC_DeInit_FS,
CDC_Control_FS,
CDC_Receive_FS,
CDC_TransmitCplt_FS
};
/* Private functions ———————————————————*/
/**
* @brief Initializes the CDC media low layer over the FS USB IP
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_Init_FS(void)
{
/* USER CODE BEGIN 3 */
/* Set Application Buffers */
USBD_CDC_SetTxBuffer(&hUsbDeviceFS, UserTxBufferFS, 0);
USBD_CDC_SetRxBuffer(&hUsbDeviceFS, UserRxBufferFS);
return (USBD_OK);
/* USER CODE END 3 */
}
/**
* @brief DeInitializes the CDC media low layer
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_DeInit_FS(void)
{
/* USER CODE BEGIN 4 */
return (USBD_OK);
/* USER CODE END 4 */
}
/**
* @brief Manage the CDC class requests
* @param cmd: Command code
* @param pbuf: Buffer containing command data (request parameters)
* @param length: Number of data to be sent (in bytes)
* @retval Result of the operation: USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_Control_FS(uint8_t cmd, uint8_t* pbuf, uint16_t length)
{
/* USER CODE BEGIN 5 */
switch(cmd)
{
case CDC_SEND_ENCAPSULATED_COMMAND:
break;
case CDC_GET_ENCAPSULATED_RESPONSE:
break;
case CDC_SET_COMM_FEATURE:
break;
case CDC_GET_COMM_FEATURE:
break;
case CDC_CLEAR_COMM_FEATURE:
break;
/*******************************************************************************/
/* Line Coding Structure */
/*—————————————————————————–*/
/* Offset | Field | Size | Value | Description */
/* 0 | dwDTERate | 4 | Number |Data terminal rate, in bits per second*/
/* 4 | bCharFormat | 1 | Number | Stop bits */
/* 0 – 1 Stop bit */
/* 1 – 1.5 Stop bits */
/* 2 – 2 Stop bits */
/* 5 | bParityType | 1 | Number | Parity */
/* 0 – None */
/* 1 – Odd */
/* 2 – Even */
/* 3 – Mark */
/* 4 – Space */
/* 6 | bDataBits | 1 | Number Data bits (5, 6, 7, 8 or 16). */
/*******************************************************************************/
case CDC_SET_LINE_CODING:
break;
case CDC_GET_LINE_CODING:
break;
case CDC_SET_CONTROL_LINE_STATE:
break;
case CDC_SEND_BREAK:
break;
default:
break;
}
return (USBD_OK);
/* USER CODE END 5 */
}
/**
* @brief Data received over USB OUT endpoint are sent over CDC interface
* through this function.
*
* @note
* This function will issue a NAK packet on any OUT packet received on
* USB endpoint until exiting this function. If you exit this function
* before transfer is complete on CDC interface (ie. using DMA controller)
* it will result in receiving more data while previous ones are still
* not sent.
*
* @param Buf: Buffer of data to be received
* @param Len: Number of data received (in bytes)
* @retval Result of the operation: USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_Receive_FS(uint8_t* Buf, uint32_t *Len)
{
/* USER CODE BEGIN 6 */
USBD_CDC_SetRxBuffer(&hUsbDeviceFS, &Buf[0]);
USBD_CDC_ReceivePacket(&hUsbDeviceFS);
return (USBD_OK);
/* USER CODE END 6 */
}
/**
* @brief CDC_Transmit_FS
* Data to send over USB IN endpoint are sent over CDC interface
* through this function.
* @note
*
*
* @param Buf: Buffer of data to be sent
* @param Len: Number of data to be sent (in bytes)
* @retval USBD_OK if all operations are OK else USBD_FAIL or USBD_BUSY
*/
uint8_t CDC_Transmit_FS(uint8_t* Buf, uint16_t Len)
{
uint8_t result = USBD_OK;
/* USER CODE BEGIN 7 */
USBD_CDC_HandleTypeDef *hcdc = (USBD_CDC_HandleTypeDef*)hUsbDeviceFS.pClassData;
if (hcdc->TxState != 0){
return USBD_BUSY;
}
USBD_CDC_SetTxBuffer(&hUsbDeviceFS, Buf, Len);
result = USBD_CDC_TransmitPacket(&hUsbDeviceFS);
/* USER CODE END 7 */
return result;
}
/**
* @brief CDC_TransmitCplt_FS
* Data transmitted callback
*
* @note
* This function is IN transfer complete callback used to inform user that
* the submitted Data is successfully sent over USB.
*
* @param Buf: Buffer of data to be received
* @param Len: Number of data received (in bytes)
* @retval Result of the operation: USBD_OK if all operations are OK else USBD_FAIL
*/
static int8_t CDC_TransmitCplt_FS(uint8_t *Buf, uint32_t *Len, uint8_t epnum)
{
uint8_t result = USBD_OK;
/* USER CODE BEGIN 13 */
if(flag)
{
CDC_Transmit_FS(UserTxBufferFS, APP_TX_DATA_SIZE);
}
UNUSED(Buf);
UNUSED(Len);
UNUSED(epnum);
/* USER CODE END 13 */
return result;
}
/* USER CODE BEGIN PRIVATE_FUNCTIONS_IMPLEMENTATION */
/* USER CODE END PRIVATE_FUNCTIONS_IMPLEMENTATION */
/**
* @}
*/
/**
* @}
*/