了解抖动如何抑制谐波和非谐波杂散以及两种不同类型的抖动系统:减法和非减法拓扑。
量化小幅度信号 可以在 量化误差 和输入,导致重要的谐波分量。高频 谐波 可以混叠回奈奎斯特间隔的频率,该频率可能是也可能不是输入的谐波。
在本文中,我们将看到抖动可以抑制谐波和非谐波杂散。我们还将介绍两种不同类型的抖动系统,即减法和非减法拓扑,并了解每种类型的重要功能。
量化小信号时的高频谐波
之前,我们讨论过即使是理想的 模数转换器 (ADC) 在数字化低振幅信号时产生谐波分量。例如,通过量化幅度为 0.75 LSB (最低有效位),我们在图1的时域中得到以下波形。
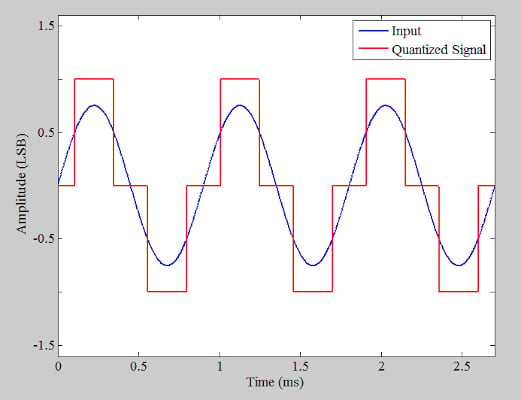
图1.显示输入和量化信号的图。
在4 MHz处对量化信号(上面的红色曲线)进行采样,并取其FFT(快速傅里叶变换),我们得到下面的频谱(图2仅显示DC至200 kHz范围)。
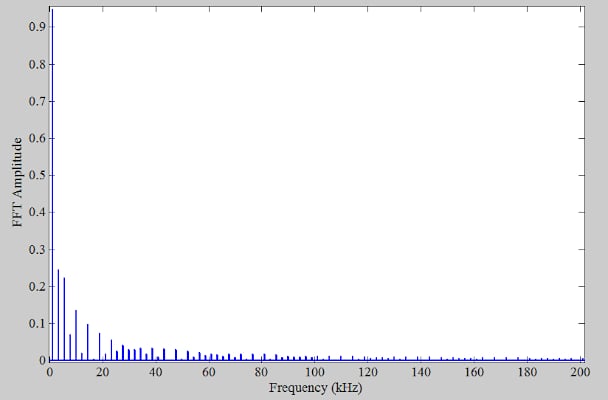
图2. f的输出频谱s= 4 兆赫。
如本文第一部分所述,输出频谱中的谐波是量化操作的伪影。通过目视检查,我们观察到这些谐波在高达180 kHz的频率下很容易辨别。为了产生上述曲线,我们故意使用远高于 奈奎斯特采样定理.这种高采样频率使我们能够获得信号的真实频谱,而不受有限采样频率的影响(就好像信号是未采样的模拟信号一样)。
量化低振幅信号引起的混叠效应
如果我们使用较低的采样率(例如40 kHz)来获取输出样本会怎样?根据奈奎斯特采样准则,40 kHz足以成功采样和重建1.11 kHz正弦波。然而,类似方波的信号具有高达40 kHz和超过40 kHz的显着谐波分量。例如,33次和35次谐波(36.63 kHz和38.85 kHz)略低于我们的新采样频率fs= 40 kHz(图 3)。
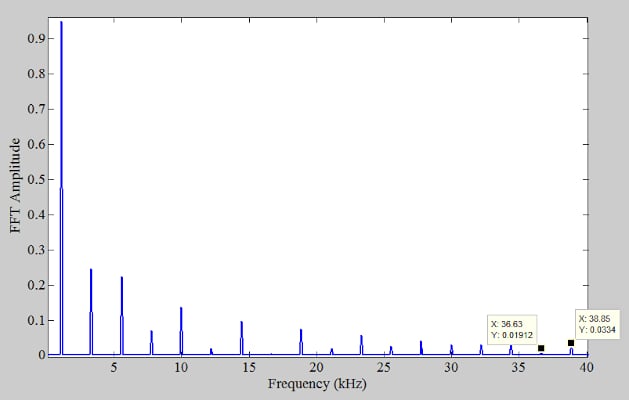
图3. f的放大光谱s= 4 兆赫。
考虑到上述频谱,40 kHz的采样频率实际上并不满足奈奎斯特的采样条件。因此,通过以40 kHz采样,所有高于20 kHz的谐波都将混叠回奈奎斯特间隔,其频率可能是也可能不是输入的谐波。图4显示了采样频率为40 kHz时的输出频谱。
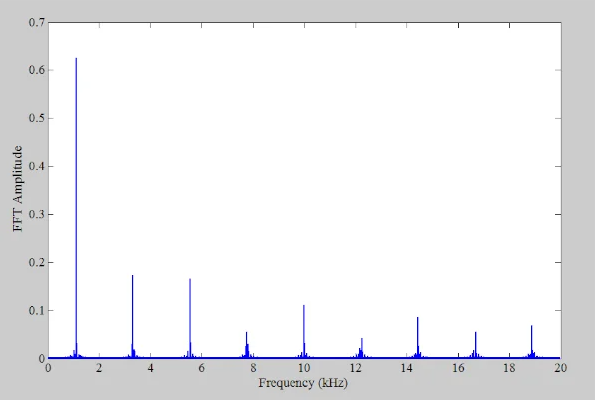
图4. f的输出频谱s= 40 kHz。
上述频谱中有谐波和非谐波分量。从图3可以看出,当使用40 kHz采样频率时,我们预计36.63 kHz和38.85 kHz的分量将分别混叠回3.37 kHz和1.15 kHz。这些混叠分量如图5所示,它提供了围绕目标频率的输出频谱的放大版本。
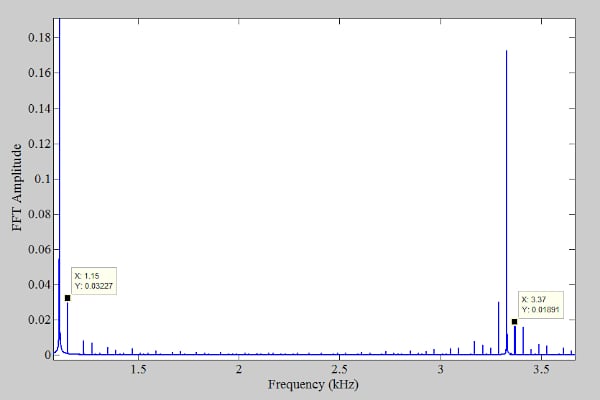
图5.围绕感兴趣频率的输出频谱的放大版本。
在信号中添加抖动噪声可以破坏量化误差和输入之间的相关性,从而消除量化失真。因此,当使用40 kHz采样频率和抖动时,我们预计谐波和非谐波分量将消失。为了验证这一点,我们添加了 噪声 在量化之前对输入进行三角形分布,然后以 40 kHz 进行采样。三角形抖动 PDF(概率密度函数)的宽度取为 2 LSB。在这种情况下,获得以下输出频谱(图6)。
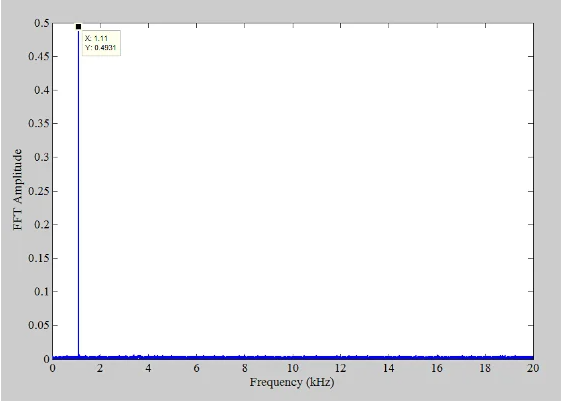
图6.f的抖动系统的谱s= 40 kHz。
施加抖动时,输入频率处只有一个显性分量。现在我们已经熟悉了抖动的功能,让我们来看看应用这种技术的不同方法。
抖动方法:减法和非减法抖动
这两种抖动方法如图 7 所示。
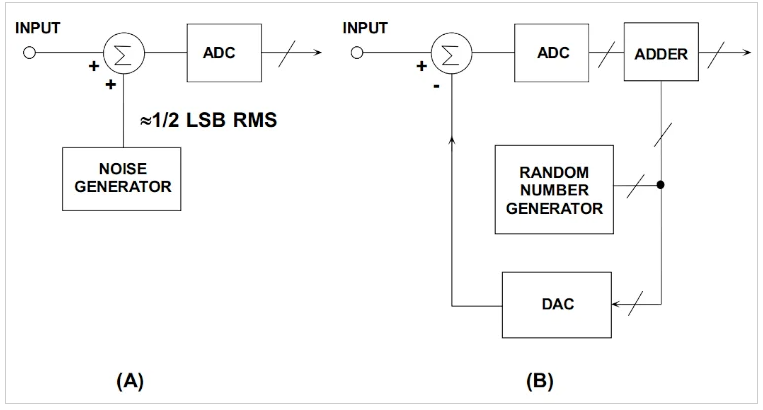
图7.(a) 非减法和 (b) 减法抖动拓扑的简单细分。图片由 ADI公司
在减法(图7(b))中,引入输入端的噪声以相反的极性添加到输出端,从而将系统输出端的净抖动噪声归零。通过图7(b)所示的特定实现,噪声发生器的输出被转换为模拟值并从输入中减去,而噪声的数字等效值则通过加法器添加到输出中。在非减法中,噪声被引入输入,而不从输出中减去。
正如我们稍后将讨论的那样,减法抖动可能比非减法版本更强大,尤其是在处理量化失真时。然而,在许多实际情况下,不可能仅仅因为抖动噪声在数字域中是未知的,就不可能从输出中减去抖动信号。
减法抖动 — 消除量化失真
抖动背后的理论相对复杂且需要数学密集型。在这里,在不通过数学细节的情况下,我们将看一下一些结果。如前所述,我们应该记住,减法抖动比非减法方法更强大。对于任意输入信号,可以证明具有适当抖动噪声的减法系统可以呈现白色的量化误差,在统计上与系统输入无关,并且在(-frac{LSB}{2})到(+frac{LSB}{2})范围内具有均匀分布。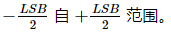
使量化噪声具有这些所需特征的一个抖动信号是白噪声,其均匀分布在(-frac{LSB}{2})到(+frac{LSB}{2})范围内。
非减法抖动 — 减少量化失真
对于任意输入,非减法拓扑不能使总误差均匀分布或在统计上独立于输入。然而,一个设计得当的非减法系统仍然可以大大改善量化系统。我们在本文第一部分中提供的仿真结果对应于非减法系统。这些模拟证实了非减材系统的有效性。
在正确选择抖动信号的情况下,非减法拓扑的总误差功率P错误,总计可以通过公式1表示(有关更多详细信息,请参阅上一节中提到的书)。
等式 1.
上述等式中的第一个项是众所周知的 理想量化器的噪声功率.第二项是抖动噪声的方差。公式1直观地有意义,因为它表明抖动噪声功率与量化噪声功率相加,从而决定了整个系统的本底噪声。如果我们使用方差较大的抖动噪声,则输出噪声水平会增加。换句话说,通过将抖动噪声添加到输入中,我们试图打破量化噪声和输入之间的相关性,但代价是略微提高了本底噪声。
常见抖动信号
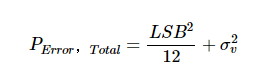
抖动信号的一个重要特征是其概率密度函数。具有高斯、矩形或三角形分布的抖动信号用于不同的应用。可用于减少非减法系统量化失真的矩形和三角形抖动信号如图9所示。
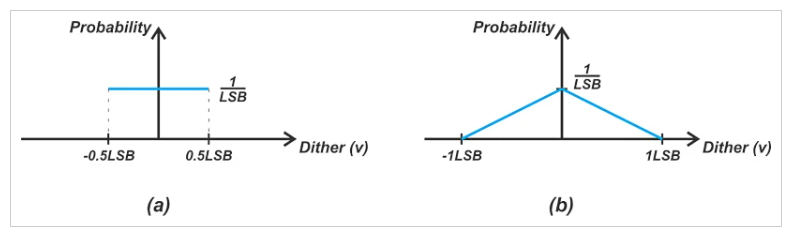
图9.(a)矩形和(b)三角形抖动信号的图,用于消除量化失真。
上述矩形和三角形抖动信号的方差分别为(frac{LSB^{2}}{12})和(frac{LSB^{2}}{6})。 和
和 分别。
分别。
对于高斯抖动,建议的方差为 (frac{LSB^{2}}{4}) 。
。
通过代入公式1中的这些值,我们可以计算出不同抖动类型的本底噪声增加。与无抖动系统相比,应用矩形、三角形和高斯抖动可以使非减法系统的本底噪声分别增加3 dB、4.8 dB和6 dB。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:通过减法和非减法抖动减少量化失真-减法可以通过什么法运算来验算 https://www.yhzz.com.cn/a/4154.html