
麻省理工学院开发出一种新型机器人,它的秘密绝技是可以像植物嫩芽向上生长一样进行自我扩展。这种“生长机器人”能够深入狭窄空间或者在工厂、仓库等杂乱的地方进行工作,比如在杂乱的架子后面拿起产品,或者绕过汽车的发动机零件拧开油盖,有效解决了机器人界的“最后一英尺”问题。
非软性这很“刚”过去,软性机器人在解决现有机器人的固定特性方面已经做了一些工作,其中包括由柔软的气球状材料制成的机器人,这种材料像藤蔓一样生长,可以通过狭窄的缝隙。但是这种软性可扩展机器人不够坚固,无法支撑“末端执行器”或执行任务所需的附加组件。
现在,麻省理工学院解决了这个问题。他们巧妙地使用刚性材料开发出一种可以自我延伸的新型机器人。它既可以扩展自身来达到之前无法达到的高度,也可以通过缝隙进入难以进入的区域,同时还可以保持必要的刚度和强度,来支撑抓取器或其他机械装置在其尖端执行拧紧螺栓或操纵手柄等工作。
研究人员在近期于澳门举行的IEEE国际智能机器人与系统国际会议(IROS)上展示了该机器人。他们设想可以将抓取器、摄像头和其他传感器安装在机器人的变速箱上,从而使其能够蜿蜒穿过飞机的推进系统并拧紧松动的螺钉,或者在不干扰周围库存的情况下伸入货架抓起产品,以及完成其他任务。
使用链式装置工作新型机器人以植物为灵感,它的“生长”方式与植物幼苗向上生长的方式惊人地相似,并通过使用一种类似自行车链条的链式装置运行。
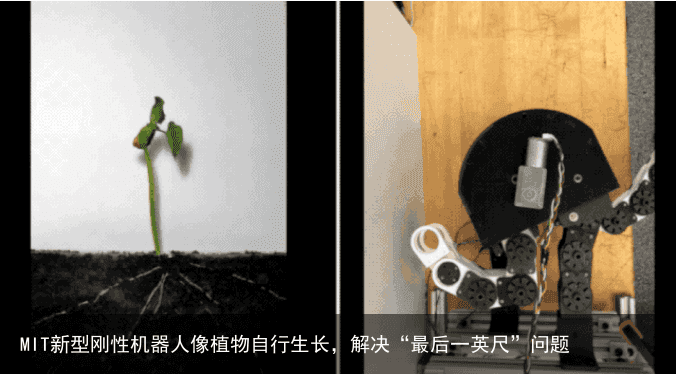
研究人员设计了一个变速箱来代表机器人“正在生长的尖端”,类似于植物的芽。随着越来越多的营养物质流向该部位,尖端将产生更坚硬的茎。在箱子中,装有齿轮和电动机系统,该系统用于拉起流化的材料,同时弯曲的3D打印塑料单元序列相互连锁,类似于自行车链条。不同之处在于,它的链接是互锁的模块,可以通过相互“锁定”来形成一个刚性柱,再通过“解锁”还原到一个灵活的状态。
研究人员可以对机器人进行编程,将某些单元锁定在一起,而其他单元则保持解锁状态,这样就可以形成特定的形状,或使机器人在某个方向“生长”。
当链条被锁定并且是刚性时,它的强度可以支撑足足一磅重。这意味着机器人可以将这种链式装置作为附件松散地包装在容器中,穿过工厂车间,移动到一些机械设备上,然后在机械设备内部延伸出一个不断增长的“手臂”。如此,这种“生长机器人”将有足够的长度和刚度去操纵控制装置,或者检查传感器是否存在损坏。
解决“最后一英尺”问题这种“生长机器人”解决了工业和商业机器人面临的一个相当普遍的挑战。目前,大多数在工业中使用的机器人基本上都需要一个广阔的开放空间来进行操作,这就需要工厂在布局设计上为它们提供足够的容纳空间。机器人的尺寸基本上是固定不变的——很少能找到一个真正能够通过变形来满足不同任务需求的机器人。
机器人专家将这称为“最后一英尺”问题——本质上类似于交通运输中的“最后一英里”问题,因为它涉及到从一个较宽、相对较容易进入的空间到一个较难到达的区域。在自动驾驶汽车的研究中,这相当于是将汽车从路边移动到家门口。而在工业机器人技术中,则指的是从露天工作到在狭窄的密闭空间中工作。显然,新型“生长机器人”满足了深入狭窄空间或在工厂、仓库等杂乱区域中工作的需求。
未来,随着科学家对工业机器人灵活性的不断解锁,机器人的应用也将更加多样化。虽然这中间还有很长的一段路要走,但这类“生长机器人”的开发无疑为日后的应用奠定了良好基础。
声明: 本文来自机器人大讲堂,目的在于信息传递,观点仅代表作者本人,不代表易百纳立场。如有侵权或其他问题,请联系我们。

免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:MIT新型刚性机器人像植物自行生长,解决“最后一英尺”问题 https://www.yhzz.com.cn/a/17820.html