- 环境:Ubuntu 12.04-64bit
- 硬件平台:Hi3520D_V100
- 内核版本:linux-3.0.y
- Qt版本:qt4.8.6
- 编译器:arm-hisiv100nptl-linux-gcc
- 作者:MacianYuan
- 原文链接:https://www.ebaina.com/articles/140000004247
- 摘要:
- 485通讯 与 TTL通讯区别:RE使能
- 485通讯初始化处理
第一节:485通讯 与 TTL通讯区别:RE使能
一、QT中的GPIO操作
485 TTL 串口 232 422 的理论知识这里就不做介绍了,网上可以找到很多相关介绍。
较其他485特殊的地方是:因为普遍使用485 是半双工的方式。而485芯片都有收发使能,即不能同时收发,所以通过RE对收发状态进行控制。
RE使能主要从3个寄存器控制引脚的状态:
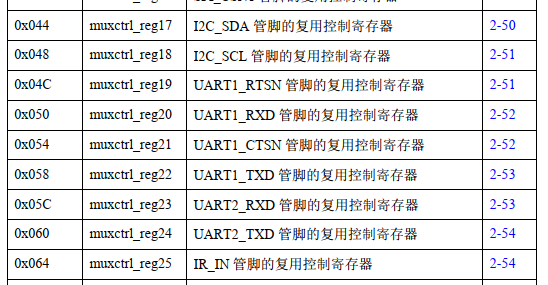
项目中硬件工程师设计的485电路,RE连接到UART1_RTSN(GPIO5_0)引脚,首先找到复用寄存器偏移地址配置复用禁用,当做普通GPIO使用,然后控制GPIO为输出,再向GPIO写入数据。参考芯片手册文档《Hi3520D/Hi3515A/Hi3515C H.264编解码处理器用户指南.pdf》
a)复用控制寄存器
- 复用的基地址 0x200F0000】 复用偏移地址 【0x04c】
- 【0】: GPIO5_0; 【1】: UART1_RTSN
- 复用控制地址 【0x200F004C】
- 即向【0x200F004C】 写入 【0】

b)方向控制寄存器
- GPIO_DIR 为 GPIO 方向控制寄存器。用来配置 GPIO 管脚方向。
- GPIO_DIR = GPIO5_BASE + OFFSET(0x400)
- 【0】:输入 【1】:输出
- 即向 【0x201A0400】 写入 【1】
根据下图手册截取的部分 :GPIO5_BASE 【0x201A0000】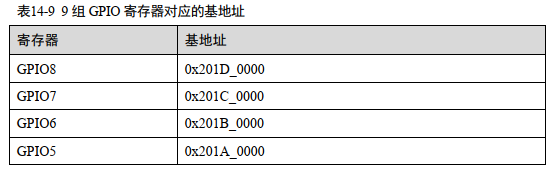
根据下图手册截取的部分 :GPIO_DIR Offset Address 【0x400】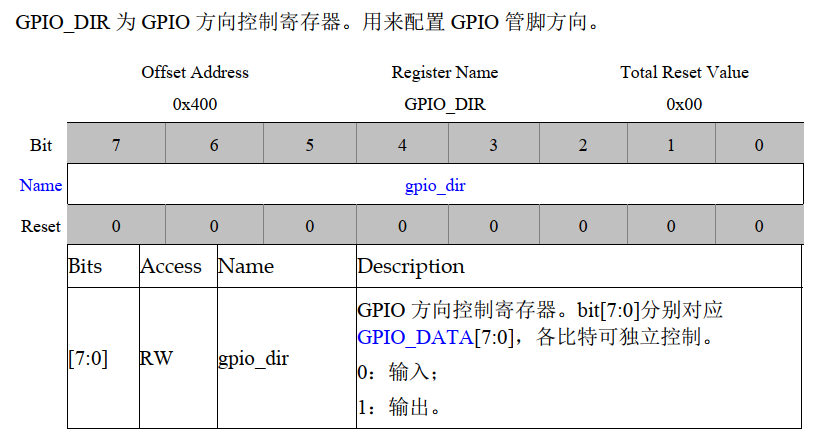
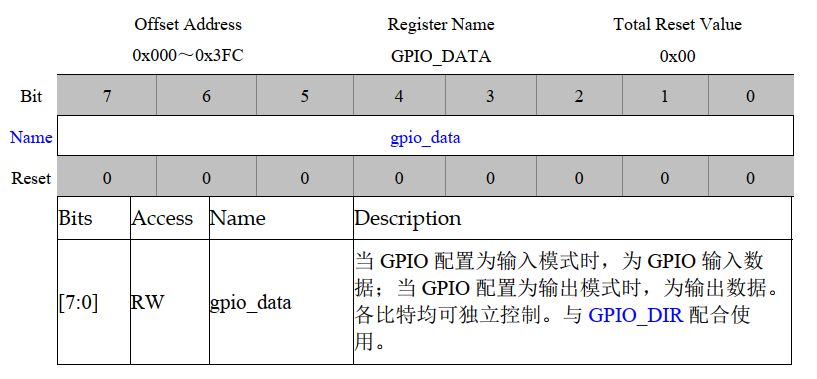
c)数据控制寄存器
GPIO_DATA 为 GPIO 数据寄存器。用来对输入或输出数据进行缓存。当配置 GPIO_DIR 中对应位为输出时,写入 GPIO_DATA 寄存器的值将会输出到相应的管脚(注意需要配置正确的管脚复用);如果配置为输入时,将会读取相应输入管脚的值。
当 GPIO_DIR 相应的bit配置为输入时,有效读取的结果将返回管脚的值;当配置为
输出的时候,有效读取的结果将返回写入的值。GPIO_DATA 寄存器利用 PADDR[9:2]实现了读写寄存器比特的屏蔽操作。该寄存器对应 256 个地址空间。 PADDR[9:2]分别对应 GPIO_DATA[7:0], 当相应的 bit 为高时,则可以对相应的位进行读写操作;反之,若对应 bit 为低则不能进行操作。
例如:
- 若地址为 0x3FC( 0b11_1111_1100),则对 GPIO_DATA[7:0]这 8bit 操作全部有效。
- 若地址为 0x200( 0b10_0000_0000),则仅对 GPIO_DATA[7]的操作有效
- 对于GPIO5_0
- GPIO_DATA = GPIO5_BASE + OFFSET(0x004)
- GPIO_DATA[0] DATA寄存器地址 【0b00_0000_0100】 = 【0x004】
- 即向【0x201A0004】 写入 【1】/【0】
二、QT调用API对上述寄存器进行操作
1、在海思给的SDK中方法比较多,这里使用最简单的一种,调用一个API就可以实现:
对于访问物理地址的Api,可以使用这个函数来访问内存地址或寄存器地址
HI_S32 HI_MPI_SYS_SetReg(HI_U32 u32Addr, HI_U32 u32Value)2、使用这个API 只需包含头文件、并在工程中增加lib库即可
#include "mpi_sys.h"
LIBS += lmpi第二节 485通讯初始化处理
一、 qt配置485 发送接收命令
485RE 引脚拉低 读 设置为接收模式
HI_MPI_SYS_SetReg(0x200F004C,0);
HI_MPI_SYS_SetReg(0x201A0400,1);
HI_MPI_SYS_SetReg(0x201A0004,0);485RE 引脚拉高 写 设置为发送模式
HI_MPI_SYS_SetReg(0x200F004C,0);
HI_MPI_SYS_SetReg(0x201A0400,1);
HI_MPI_SYS_SetReg(0x201A0004,1);485初始化函数
SensorAnalysis::SensorAnalysis(QObject *parent) :
QObject(parent)
{
//485RE 引脚拉低 可读
HI_MPI_SYS_SetReg(0x200F004C,0);
HI_MPI_SYS_SetReg(0x201A0400,1);
HI_MPI_SYS_SetReg(0x201A0004,0);
//普通串口初始化
Device_public::sensor_port = new QextSerialPort("/dev/ttyAMA3",QextSerialPort::EventDriven);
//注意:得要先打开串口,然后再设置串口的参数,不然设置无效!!!
int m_fd = Device_public::sensor_port->open(QIODevice::ReadWrite);
//定义串口对象,并传递参数,在构造函数里对其进行初始化
if(m_fd){
//Device_public::sensor_port->setDtr(true);
//Device_public::sensor_port->setRts(false);
//设置波特率
Device_public::sensor_port->setBaudRate(BAUD9600);
//设置数据位
Device_public::sensor_port->setDataBits(DATA_8);
//设置奇偶校验
Device_public::sensor_port->setParity(PAR_NONE);
//设置停止位
Device_public::sensor_port->setStopBits(STOP_1);
//设置数据流控制,我们使用无数据流的默认设置
Device_public::sensor_port->setFlowControl(FLOW_OFF);
//设置延时 --Modify 改小点
Device_public::sensor_port->setTimeout(10);
qDebug() <<"Device_public::sensor_port /dev/ttyAMA3 success!";
}else{
qDebug () << tr("open serial failed");
}
//定时接收100ms的数据 使接收数据包完整
timer = new QTimer(this);
timer->setInterval(100);
//在有数据到达时开启计时
connect(timer, SIGNAL(timeout()), this,SLOT(on_timeout()));
//定时获取传感器状态,5S采集一次
timer2 = new QTimer(this);
timer2->setInterval(5000);
timer2->start();
connect(timer2, SIGNAL(timeout()), this,SLOT(on_timeout2()));
//有数据读取到,进入数据分析槽函数,分析出数据
connect(Device_public::sensor_port, SIGNAL(readyRead()), this,SLOT(ReadCom()));
}免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:【海思HI3520之QT开发】-串口通讯实战(四):串口通讯之485通讯 https://www.yhzz.com.cn/a/17267.html