上次给大家把底层的SPI驱动添加给大家讲完了,最后一节把上层应用程序的主意事项告诉大家。 首先,上层应用使用的spi头文件,建议大家使用20Dv400里的hi_spi.h。 第二,头文件中的结构体,宏定义啥的一点都不能修改,这些东西在底层调用的时候都会做判断,只要有一点点的修改,就会造成判断不过,无法通讯的情况。 第三,spi初始化的时候一定要保证通讯双方的模式,通讯位数,通讯速率一样,不然就无法通讯。最后把我的初始化函数贴在后面拉,仅供参考。 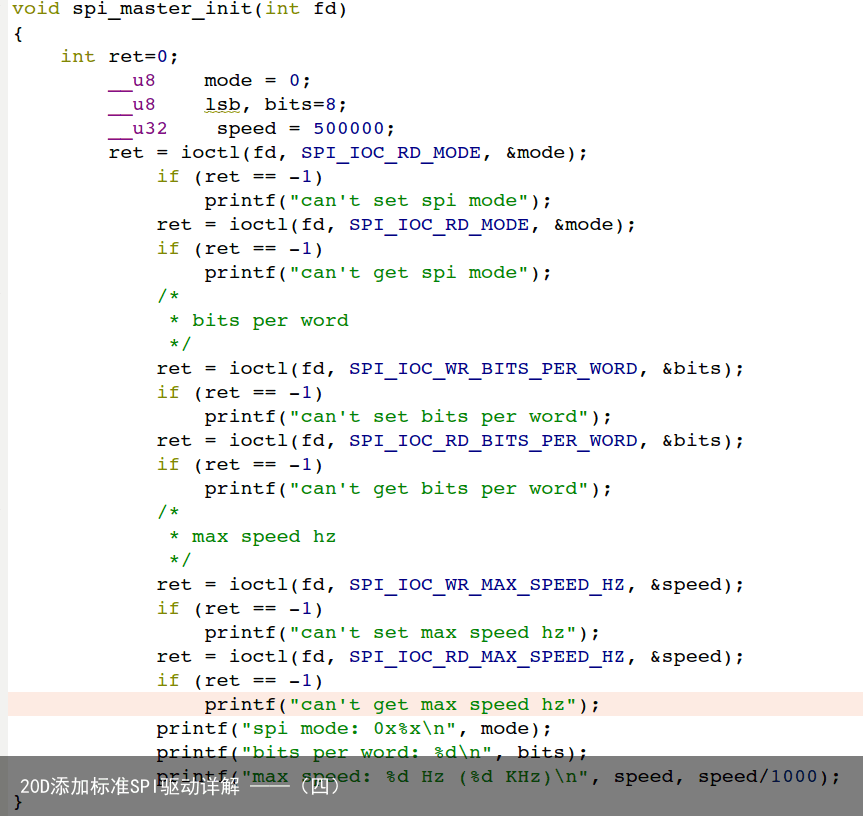
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:20D添加标准SPI驱动详解 ——(四) https://www.yhzz.com.cn/a/15512.html