说到STM32,大家不陌生,mdk环境+开发板+jlink即可搞定,但对于mdk开发环境,大部分人并不能说清楚。对于一个工程的编译,链接,烧写,调试过程完完全全集成在一个软件里,一键即可实现,这当然方便开发,但我们想要了解的编译、链接规则,调试原理等,却一无所知,所以当MDK出现一些奇怪的BUG时无从下手,明明是软件问题我们却查找代码错误。本文介绍一种原始的stm32开发方式,在linux操作系统下,所有的编译,链接,调试工作都是由你自己去决定完成,包括makefile的编写,以后对于高级嵌入式开发有需求的开发者可以先用stm32这种易上手的系统试试水,了解这种linux下的嵌入式开发的一般流程,这样,以后不管遇到任何平台的任何芯片,都有一个大体开发思路可以遵循,不至于一头雾水。进入正题,直接开始操作吧。
一.linux系统安装
建议安装ubuntu虚拟机,教程百度。二.gcc-arm-none-eabi交叉编译器的安装
对于交叉编译这一概念,很多人陌生,在windows下几乎没有这一概念(实际就是交叉编译),所谓交叉即为pc端编译好的工程拿去嵌入式端直接运行,因为嵌入式系统资源有限,没有能力自己编译自己的工程再运行,试想以下MDK不就是这样吗,实际上MDK也用类似的编译器,功能完全一样。ps:pc端编译pc端运行的程序叫做本机编译,例如vs,vc等工具。所以,让我们先在linux下安装交叉编译工具链吧。 打开下载页面 https://developer.arm.com/open-source/gnu-toolchain/gnu-rm/downloads/5-2016-q3-update这是一个嵌入式交叉编译开发者项目团队的官网,如下有几个下载链接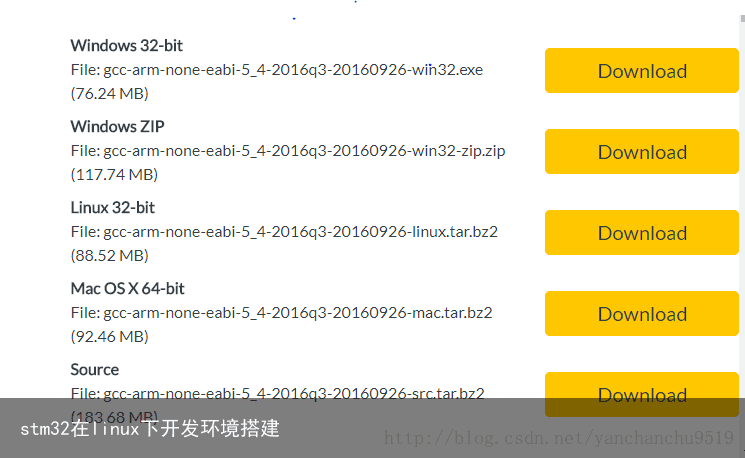
顾名思义,我们选linux下的download(Source为工具链的源码,需要经过编译后才能生成交叉编译工具链,捋一捋关系),而我们选择下载现成工具链,有兴趣的可以查阅相关资料自己编译Source生成工具链。
下载到Windows上之后我们可以将其拷贝到linux下的/opt/gcc-arm-none-eabi/下(自建文件夹),解压。 进入bin: cd /opt/gcc-arm-none-eabi/gcc-arm-none-eabi-5_4-2016q3/bin/ 可以看到我们已经安装的工具了。其中后缀为gcc的为C编译器,后缀为g++的为c++编译器,ld为链接器,gdb为debug等 设置环境变量:export PATH=$PATH:/opt/gcc-arm-none-eabi/gcc-arm-none-eabi-5_4-2016q3/bin
这样你只需要以后键入gcc-arm然后按Tab键系统就会按照此路径寻找到bin下的各个工具,然后自动补齐为 gcc-arm-none-eabi- 到此我们的交叉编译工具链已经安装好(包括编译器和链接器)。三.openocd安装 openecd是一个集成了stlink,ulink,jlink等多种协议的调试软件,相当于mdk的烧写和debug功能,因此不用问为什么,想要烧程序,必须安装。 下载地址:https://sourceforge.net/projects/openocd/ 同样下载完成后拷贝至linux下,路径随意,我的是/opt/openocd/ 解压,进入openocd-0.10.0,cd /opt/openocd/openocd-0.10.0/ 因为下载的是源码工程,所以要先后经过配置(主要配置调试器的类型),编译,安装流程 配置之前安装两个包:sudo apt-get install libusb++-dev libusb-1.0.0-dev 配置: ./configure 稍等片刻即可列出调试器,如果你想要的调试器处于关闭状态,比如我这里想要配置jlink,则重新配置加上参数:
./configure –enable-jlink 稍等片刻即可,如图: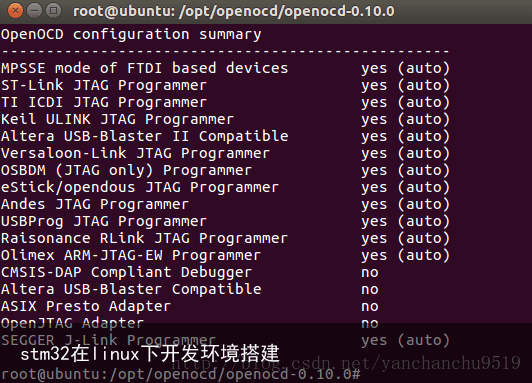 可以看到已经配置好了segger的jlink
编译: make
安装: make install
至此调试器安装完成,默认安装路径是/usr/local/share下的openocd
四.调试器的驱动安装(jlink)
我使用的是jlink,所以介绍jlink的安装,其他调试器可以自行查找资料。
下载jlink驱动的官网地址:http://www.segger.com/cms/jlink-software.html
选择downloadJ-Link Software and Documentation pack for Linux, TGZ archive, 32-bit
拷贝至linux下的/opt/jlink_driver/
解压,进入文件夹后执行 cat README.txt查看安装说明,按照要求执行命令后重启系统。
然后执行以下命令:
cp libjlinkarm.so. /usr/lib
cp JLinkGDBServer /usr/bin/
cp JLinkExe /usr/bin/
usermod -a -G plugdev
至此jlink的驱动安装完毕。
可以看到已经配置好了segger的jlink
编译: make
安装: make install
至此调试器安装完成,默认安装路径是/usr/local/share下的openocd
四.调试器的驱动安装(jlink)
我使用的是jlink,所以介绍jlink的安装,其他调试器可以自行查找资料。
下载jlink驱动的官网地址:http://www.segger.com/cms/jlink-software.html
选择downloadJ-Link Software and Documentation pack for Linux, TGZ archive, 32-bit
拷贝至linux下的/opt/jlink_driver/
解压,进入文件夹后执行 cat README.txt查看安装说明,按照要求执行命令后重启系统。
然后执行以下命令:
cp libjlinkarm.so. /usr/lib
cp JLinkGDBServer /usr/bin/
cp JLinkExe /usr/bin/
usermod -a -G plugdev
至此jlink的驱动安装完毕。
所有准备工作以完成,开始应用实践。
原文链接:https://blog.csdn.net/yanchanchu9519/article/details/79485463
相关推荐:
海思HI35XX串口调试 海思多媒体(MPP)开发(1)——nvp6134驱动介绍 海思hi3516A-sample的使用1–sensor加载免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:stm32在linux下开发环境搭建 https://www.yhzz.com.cn/a/15319.html