如果大家用的新唐的板子的话,而又要用485通讯功能,一定会去参考自带的UART_DEMO示例程序。新唐的实例程序分为两种类型,一种就是寄存器版本的,一种叫做API版本的。如果用API写程序的同仁们,一定会非常欣慰,因为这个示例程序就是485的,只要改改就行了,而用寄存器版本写程序的一定非常苦恼(笔者就是一直用寄存器版本的写程序),因为它就是一个普通的UART通讯功能,很多人会想着看看API的版本的,慢慢翻译成寄存器版本的,但是两者有些区别,经过这两天的深入,我已经把API版本改成了寄存器版本,改的是面目全非,因为我的初始化代码几乎和API的版本的一样,但是它能运行出结果,而我不行,这如何不叫人纠结呢?
在新唐的两个版本中,有这样两个区别,大家需要注意的:
API版本中,用的UART时钟是内部的22MHZ的晶振,大家一定看到了算晶振的波特率的函数,所以没有深入看,只知道可以得出自己想要的晶振就可以了(一般用9600的波特率),而寄存器版本中用的还是外部的12MHZ晶振 第二个不同的地方也是我纠结了3个星期终于发现了,也是我的问题所在的,就是API版本中,配置了管脚为RTS0功能,而寄存器版本中没有,所以即使后面初始化和API非常相似,也出不来结果,这是一个很重要的原因!(RTS0功能就是自动方向控制,是485中用来控制收发的) 解决了这两个问题,485通讯来说,基本就可以平坦大道了,但是这样说也许很空虚,下面附上485的电路图和485初始化的寄存器版本的代码,希望对大家有帮助,只是新唐Cortex-M0的代码,如果不是这个芯片的可以看看步骤,应该也没有什么太大问题。如下图就是RS85通讯的电路图: 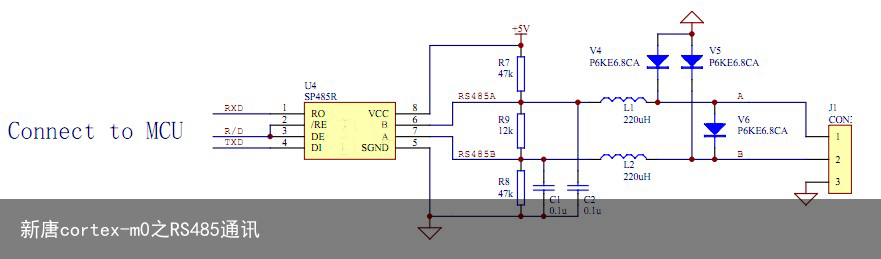
下面是代码部分:
#define UARTClkSource_in22MHZ (CLKSEL1 = ((CLKSEL1 & (~UART_CLK)) | UART_22M)) #define UART0_Clock_EN APBCLK |= UART0_CLKEN // Enable UART0 clock void UART_Init(void) { /* Step 1. GPIO initial */ P3_MFP &= ~(P31_TXD0 | P30_RXD0); P3_MFP |= (TXD0 | RXD0); //P3.0 –> UART0 RX //P3.1 –> UART0 TX P0_MFP &= ~(P03_AD3_RTS0 | P02_AD2_CTS0); P0_MFP |= (RTS0 | CTS0); //P0.3—->RTS0自动方向控制 //这里就是配置的地方,笔者就是这里错了,导致了3个星期没有出来, /* Step 2. Enable and Select UART clock source */ UART0_Clock_EN; //UART Clock Enable, APBCLK[16]:1 //UARTClkSource_ex12MHZ; //UART Clock is ext12MHz, CLKSEL1[25,24]: 00 UARTClkSource_in22MHZ; //使用内部22MHZ晶振 CLKDIV &= ~(15<<8); //UART Clock DIV Number = 0; /* Step 3. Select Operation mode */ IPRSTC2 |= UART0_RST; //Reset UART0 IPRSTC2 &= ~UART0_RST; //Reset end UA0_FCR |= TX_RST; //Tx FIFO Reset UA0_FCR |= RX_RST; //Rx FIFO Reset UA0_FCR |= RFITL_1; //设置为1个字节触发中断 UA0_LCR &= (~SPE); UA0_LCR &= (~EPE); UA0_LCR &= (~PBE); //Parity Bit Disable 校验禁止 UA0_LCR &= ~WLS; UA0_LCR |= WL_8BIT; //8 bits Data Length 8位长度 UA0_LCR &= NSB_ONE; //1 stop bit 1位停止位 /* Step 4. Set BaudRate to 115200*/ //UA0_BAUD |= DIV_X_EN; //Mode2:DIV_X_EN = 1 //UA0_BAUD |= DIV_X_ONE; //Mode2:DIV_X_ONE =1 //上面是使用12M晶振的波特率设置 //下面的是使用22M晶振波特率的设置 UA0_BAUD &= (~(1<<29)); // UA0_BAUD |= (1<< 29); //Mode2:DIV_X_EN = 1 UA0_BAUD &= (~(1<< 28)); // UA0_BAUD |= (1<< 28); //Mode2:DIV_X_ONE =1 /* For XTAL = 12 MHz */ //UA0_BAUD |= ((12000000 / 9600) -2); //Set BaudRate to 115200; UART_CLK/(A+2) = //115200, UART_CLK=12MHz /*FOr 12MHz*/ UA0_BAUD |= ( 22118400UL / 9600/16 -2); /* For XTAL = 11.0592 MHz */ //UA0_BAUD |= ((11059200 / 115200) -2); //Set BaudRate to 115200; //UART_CLK/(A+2) = 115200, UART_CLK=12MHz } void initRS485(void) { UA0_FUN_SEL = RS485_EN; //设置为485功能 UA0_FCR |= (RX_DIS); //禁止接收器接受 UA0_RS485_CSR |= RS485_NMM; //设置为485普通操作模式 UA0_RS485_CSR |= RS485_AUD; //设置为控制自动方向模式 /* 开启UART0中断 */ UA0_IER |= RDA_IEN; //开启可接受数据中断和 UA0_IER |= RLS_IEN; //接收器上中断状态使能,是一个错误中断,见M0手册 NVIC_ISER |= UART0_INT; // NVIC_IPR3 |= UART0_PRI0; //设置优先级为3(最小优先级) } void initRS485(void) { UA0_FUN_SEL = RS485_EN; //设置为485功能 UA0_FCR |= (RX_DIS); //禁止接收器接受 UA0_RS485_CSR |= RS485_NMM; //设置为485普通操作模式 UA0_RS485_CSR |= RS485_AUD; //设置为控制自动方向模式 // UA0_IER |= AUTO_RTS_EN; // UA0_FCR |= RTS_TRI_4; // UA0_MCR |= (LEV_RTS_H); //设置RTS为1,使能485驱动器 /* 开启UART0中断 */ UA0_IER |= RDA_IEN; //开启可接受数据中断和 UA0_IER |= RLS_IEN; //接收器上中断状态使能 NVIC_ISER |= UART0_INT; // NVIC_IPR3 |= UART0_PRI0; //设置优先级为3(最小优先级) }原文链接:https://blog.csdn.net/memoryjs/article/details/6795803?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522159728998019725211962540%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=159728998019725211962540&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_v1~rank_blog_v1-11-6795803.pc_v1_rank_blog_v1&utm_term=%E6%96%B0%E5%94%90&spm=1018.2118.3001.4187
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:新唐cortex-m0之RS485通讯 https://www.yhzz.com.cn/a/14447.html