 手套与SLIMS传感器集成在一起。Credit: Hedan Bai
手套与SLIMS传感器集成在一起。Credit: Hedan Bai
并不是说可伸缩传感器可以改变软机器人的功能和感觉。实际上,他们将能够感受到很多。
康奈尔大学的研究人员创造了一种结合了低成本LED和染料的光纤传感器,从而形成了可拉伸的“皮肤”,可检测压力,弯曲和应变等变形。这种传感器可以为软机器人系统(以及使用增强现实技术的任何人)提供感受到哺乳动物在自然世界中航行所依赖的丰富,触觉的能力。
由机械和航空航天工程副教授罗布·谢菲德(Rob Shepherd)领导的研究人员正在致力于将物理疗法和运动医学的技术商业化。
他们的论文“可拉伸的分布式光纤传感器”在《科学》杂志上发表。该论文的共同主要作者是博士生Hedan Bai和Shuo Li。
Bai从基于二氧化硅的分布式光纤传感器中汲取了灵感,并开发了用于多模式传感(SLIMS)的可拉伸光导。该长管包含一对聚氨酯弹性体芯。一个核心是透明的;另一个在多个位置填充有吸收染料,并连接到LED。每个核心与一个红-绿-蓝传感器芯片耦合,以记录光的光路中的几何变化。
 手套与SLIMS传感器集成在一起。Credit: Hedan Bai
手套与SLIMS传感器集成在一起。Credit: Hedan Bai
研究人员设计了一种3D打印手套,每个手指都有一个SLIMS传感器。该手套由锂电池供电并配备了蓝牙,因此可以将数据传输到Bai设计的基本软件,该软件可以实时重建手套的运动和变形。
谢菲德说:“目前,传感主要依靠视觉来完成。” “我们几乎从来没有在现实生活中测量过触摸。这种皮肤可以让我们和机器以目前我们在手机中使用摄像头的方式来测量触觉交互。它是通过视觉来测量触摸的。这是最方便的一种可扩展的实用方式。”
Bai和谢菲德正在与康奈尔大学技术许可中心合作,为该技术申请专利,并着眼于物理疗法和运动医学的应用。这两个领域都利用了运动跟踪技术,但是直到现在还没有捕获力相互作用的能力。
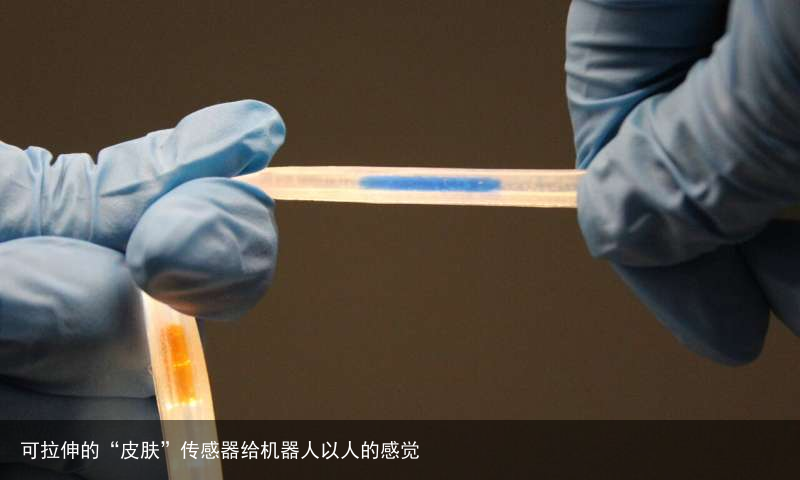 具有离散/渐变染料图案的可拉伸DFOS,可拉伸/扭曲/弯曲。Credit: Hedan Bai
具有离散/渐变染料图案的可拉伸DFOS,可拉伸/扭曲/弯曲。Credit: Hedan Bai
研究人员还正在研究SLIMS传感器可以增强虚拟和增强现实体验的方式。
谢菲德说:“ VR和AR沉浸是基于动作捕捉的。触摸几乎不存在。” “假设您想进行增强现实仿真,以教您如何修理汽车或更换轮胎。如果您戴着手套或可以测量压力以及运动的东西,那么增强现实可视化可能会说:转弯然后停下来,这样就不会拧得太紧。” 目前没有任何东西可以做到这一点,但这是做到这一点的途径。”
来源:Cornell University
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:可拉伸的“皮肤”传感器给机器人以人的感觉 https://www.yhzz.com.cn/a/14001.html