1. 前言
由于车载设备一般上车后只有CAN接口,无其他调试接口;
当涉及到车载设备程序更新时,就只能使用CAN接口进行程序升级;
所以就需要开发支持CAN协议的bootloader程序用于支持在线刷机。
2. 主要功能概述程序组成: bootloader + APP主程序 + 环境变量 注: 这里的基本原理是根据linux系统的uboot+kernel的原理来实现的,所以组成部分类似
主要功能如下:
(1)上电启动读取flash中的环境变量,判断是进入bootloader还是跳转到主程序
(2)环境变量可以通过主程序进行响应修改
(3)无需进入bootloader时,跳转到app执行地址【这些需要注意】
(4)进入bootloader时, while循环解析CAN 命令【擦除命令,写命令等】
(5)刷机流程– 这里需要将CAN数据存储到本地校验,然后往指定地址刷数据
3. stm32工程创建创建STM32工程,直接拷贝cube文件,去除不需要的外设,生成工程代码; 这里就不详细描述使用Cube创建工程了
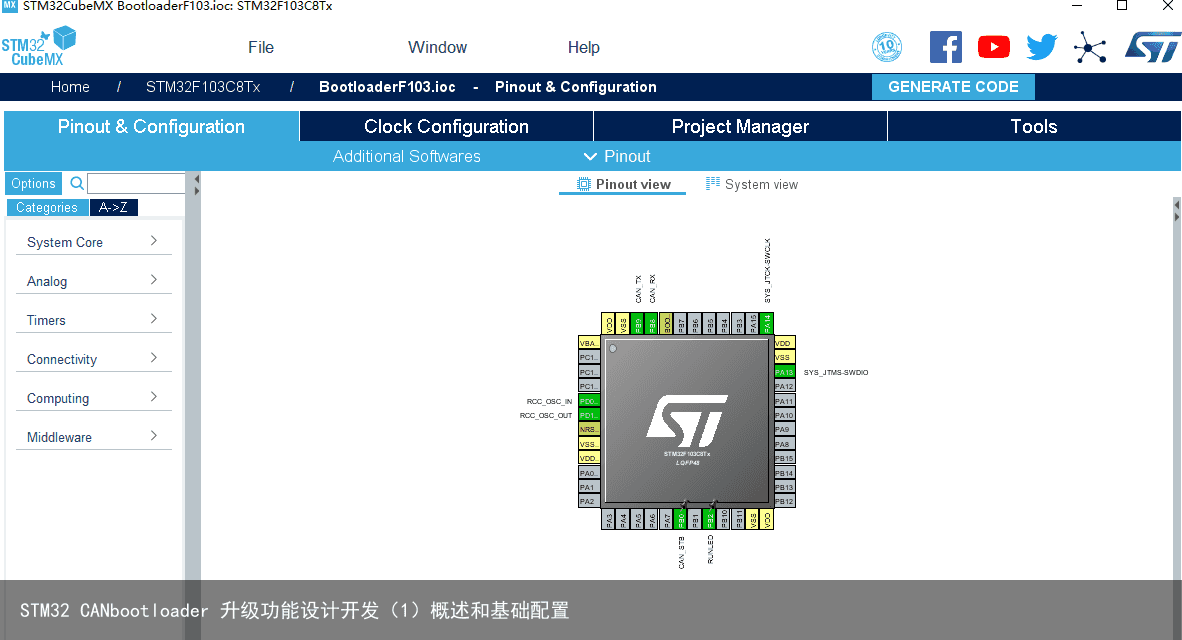
重置所有外设,初始化Flash界面和Systick
(2) SystemClock_Config配置系统时钟
(3) MX_GPIO_Init初始化所有配置的外设
(4) MX_CAN_Init初始化CAN设备 如下: 这里使用的是CAN1设备
void MX_CAN_Init(void) { hcan.Instance = CAN1; hcan.Init.Prescaler = 6; hcan.Init.Mode = CAN_MODE_NORMAL; hcan.Init.SJW = CAN_SJW_1TQ; hcan.Init.BS1 = CAN_BS1_5TQ; hcan.Init.BS2 = CAN_BS2_6TQ; hcan.Init.TTCM = DISABLE; hcan.Init.ABOM = DISABLE; hcan.Init.AWUM = DISABLE; hcan.Init.NART = DISABLE; hcan.Init.RFLM = DISABLE; hcan.Init.TXFP = DISABLE; if (HAL_CAN_Init(&hcan) != HAL_OK) { Error_Handler(); } }免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:STM32 CANbootloader 升级功能设计开发(1)概述和基础配置 https://www.yhzz.com.cn/a/13907.html