1. 前言
最后这部分内容,主要是一些逻辑关键功能; 例如,
bootloader如何调整到app地址段执行? 如何解析CAN数据? 如何防止CAN设备变砖? 2. bootloader跳转app功能实现app起始地址0x8004000 bootloader的烧写地址仍是0x08000000
(1)修改app程序相关设置
keil软件编译时需要修改烧写地址成8004000
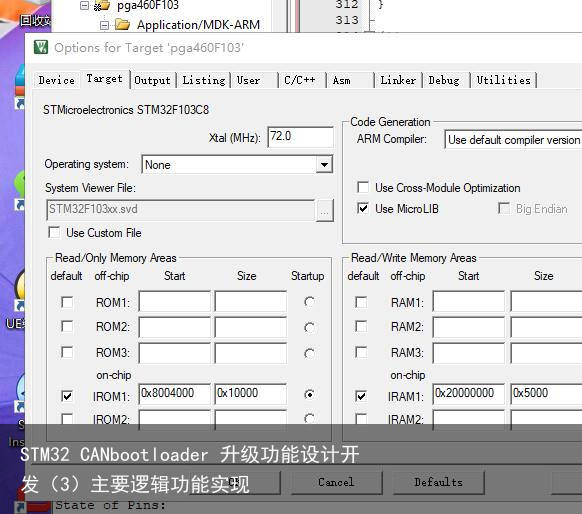
keil进入Linker点击“edit”,修改源码改为0x08004000
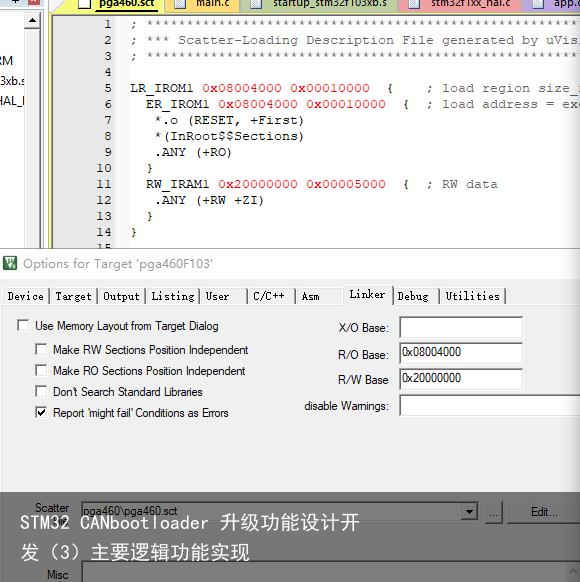
(2)bootloader跳转接口实现
if(*((uint32_t *)EXE_FLAG_START_ADDR)== EXE_FLASH_MAGICNUMBER ) { JumpToApplication(START_ADDR); }接口实现如下: 注意: 跳转之前必须清楚外设状态,避免外设初始化冲突
void CAN_BOOT_JumpToApplication(uint32_t Addr) { static pFunction Jump_To_Application; __IO uint32_t JumpAddress; /* Test if user code is programmed starting from address “ApplicationAddress” */ if (((*(__IO uint32_t*)Addr) & 0x2FFE0000 ) == 0x20000000) { /* Jump to user application */ JumpAddress = *(__IO uint32_t*) (Addr + 4); Jump_To_Application = (pFunction) JumpAddress; __set_PRIMASK(1); /* Initialize user applications Stack Pointer */ __set_MSP(*(__IO uint32_t*)Addr); /*must reset£¬or can not succeed to jump to App/UpBootloader*/ MX_CAN_DeInit(); MX_GPIO_DeInit(); HAL_DeInit(); Jump_To_Application(); } }(3)app程序设置部分
重定位中断向量表
开启所有中断
复位RCC
进入main函数时,设置如下: SCB->VTB = 0x08004000; __set_PRIMASK(0); HAL_RCC_DeInit(); 3. CAN命令解析(1)通过CAN接收中断设置的标志位进行判断
if(CanRxFlag){ CAN_ExecutiveCmd(&RxBuf); CanRxFlag = 0; }(2)CAN cmd定义
CBL_CMD_LIST CMD_List = { .Erase = 0x00, //擦除 .WriteInfo = 0x01, //设置参数 .Write = 0x02, //写数据 .Check = 0x03, //检测节点是否在线 .SetBaudRate = 0x04, //设置波特率 };具体如何解析CAN 命令,这里就不累述了,比较简单
3. 添加强制刷机功能原因:这里主要是用于CAN设备如果出现系统错误,无法正常进入bootloader之后,变成砖
方法: 进入bootloader会响应一个上位机的强制刷机命令,如果接收到,就强制擦除环境变量,然后强制进入bootloader,避免成砖;
实现如下:
do { HAL_Delay(1); i++; if (CanRxFlag) { if (0x84 ==RxBuf.StdId) { { HAL_FLASH_Unlock(); FLASH_PageErase(APP_START_ADDR); HAL_FLASH_Lock(); break; } } } if(1000 < i) { break; } } while (1);免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:STM32 CANbootloader 升级功能设计开发(3)主要逻辑功能实现 https://www.yhzz.com.cn/a/13835.html