-目标是在2021财年实现无需现场预学习就能够进行高精度识别的物流机器人的商业化。促进物流业加速自动化
东京―东芝公司(东京证券交易所:6502)开发了一种AI,该AI可以准确估计使用标准可见光相机拍摄的图像中随机堆积的单个物体的区域(注1)。集成了AI的物流机器人执行高精度的装卸,并且在针对公共数据集的测试中(注2),AI过去提高了45%,在测量精度方面是世界上最好的记录(注3)。由于AI使用的是来自标准相机的图像,因此与基于三维传感器的AI相比,AI的学习过程要短得多。它还无需任何现场预安装学习即可轻松实施。
东芝的目标是在2021财年使用AI将卸载机器人商业化。AI的详细信息将在2020年ACCV国际计算机视觉会议上发布,该会议将于2020年11月30日至12月4日在网上直播。
物流机器人最初用于在仓库中运输包裹,现在也正在卸载和拣选包裹。这一进展推动了全球物流机器人市场,预计将从2018年的43.5亿美元增长到2027年的约202.9亿美元(注4)。卸货和拣选机器人必须能够正确识别和处理各种形状和大小的物体,这需要技术来识别单个物体的区域,甚至是那些从上面拍摄的图像中随机堆积并相互重叠的区域。
一种方法使用3D传感器,该传感器可以测量深度并准确识别重叠包装的区域,但是这种传感器很昂贵,并且收集用于学习过程的三维数据的额外负担。使用标准摄像机的图像作为一种低成本解决方案引起了人们的兴趣,但是直到现在,它都与AI将多个对象误识别为单个对象的风险联系在一起。在成本,效率和准确性之间进行权衡。
东芝的新AI使用点来提取对象区域。它可以根据标准相机图像对单个包装的区域进行高度准确的估算,即使是对于随机堆积的重叠包装也是如此。
一种使用标准相机的对象区域提取的当前方法(注释5)通过将每个识别出的对象包含在矩形图像中并检测矩形中的对象区域作为像素遮罩来识别对象的候选区域。但是,此方法对于重叠的对象返回的结果不准确-如果对象之间存在明显的重叠,则矩形也是如此,并且AI将其识别为单个对象(图1)。 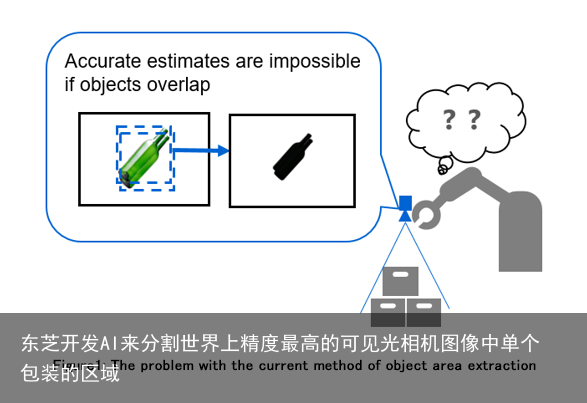 图1:当前对象区域提取方法的问题
图1:当前对象区域提取方法的问题
东芝的AI解决了这个问题。它可以将图像的一小部分识别为候选对象,并且可以准确地估计每个对象区域,而不会将多个重叠的对象误认为一个对象。
在操作中,AI对照其学习的神经网络检查图像中的每个像素。它寻找特定对象的特征值,并标识具有相似特征值的像素,以指示各个对象。然后将这些像素放在一起,并确定一个特定像素作为特定对象的代表点。最后,通过针对候选点评估具有相似特征值的像素来估计对象的区域。
测试证实,即使包装重叠,东芝的新AI仍成功部署了这些技术,以对图像中单个包装的区域进行高度准确的估计(图2)。经过对公共数据集(注2)(图3)的测试,它比过去提高了45%,是世界上测量精度最高的性能。 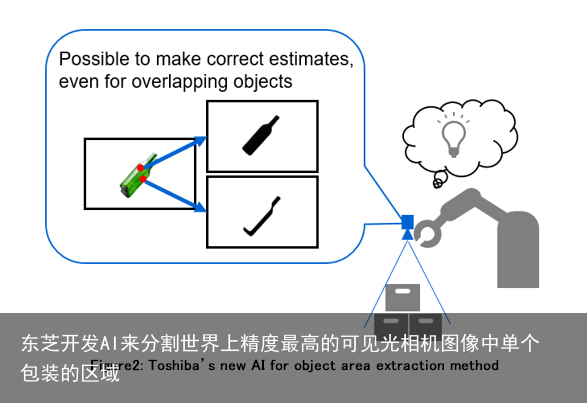 图2:东芝的新型AI用于对象区域提取方法
图2:东芝的新型AI用于对象区域提取方法 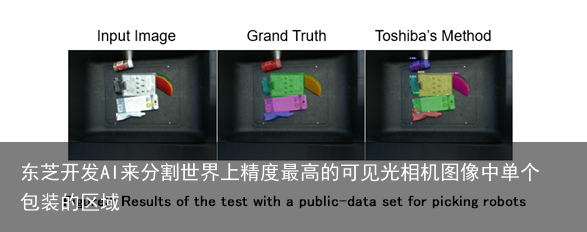 图3:带有用于拣选机器人的公共数据集的测试结果
图3:带有用于拣选机器人的公共数据集的测试结果
使用WISDOM数据集
为了支持进一步加速物流业的自动化,东芝将在2021财年向市场推出带有新型AI的卸货机器人。
(注1) “估计区域”是指即使仅部分可见,也要根据其特征识别对象。 (笔记2) WISDOM数据集:https : //sites.google.com/view/wisdom-dataset/dataset_links (注3) 当估计区域和正确答案区域之间的重叠率为75%或更大时,比较正确答案率的图。东芝研究(2020年11月) (注4) 来源:市场研究报告,Global Information,Inc.的“到2027年的物流机器人市场-按功能,行业,机器人类型进行的全球分析和预测”。 (注5) 何凯明等人的Mask-RCNN,ICCV2017最佳论文奖获得者
来源:Toshiba Corporation
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:东芝开发AI来分割世界上精度最高的可见光相机图像中单个包装的区域 https://www.yhzz.com.cn/a/13723.html