今天我主要给大家来介绍下传感器中的传输噪声产生,以及消除方法。
传感器以及对应的连接电路的环境稳定性很大程度上取决于其对外部噪声的干扰性。下图是传输噪声的传播过程。 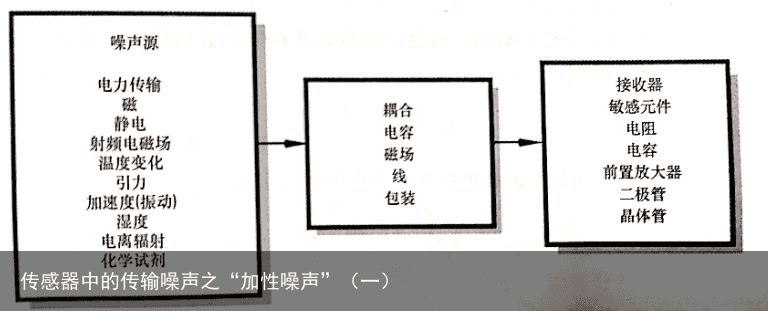 噪声通常是很难辨别的,例如电源线的电压冲击,闪电,环境温度的改变,太阳活动等等,这些干扰在传感器和接口电路中传播,其引起的问题最终都会层现在输出端,但是,在它到达输出端之前,肯定会对传感器内部的敏感元件,它的输出端口,以及电路的各个元件造成一定程度的影响,这里,传感器及接口电路的角色是干扰的接收器。
噪声通常是很难辨别的,例如电源线的电压冲击,闪电,环境温度的改变,太阳活动等等,这些干扰在传感器和接口电路中传播,其引起的问题最终都会层现在输出端,但是,在它到达输出端之前,肯定会对传感器内部的敏感元件,它的输出端口,以及电路的各个元件造成一定程度的影响,这里,传感器及接口电路的角色是干扰的接收器。
根据传输噪声对输出信号的影响程度,传输噪声如何进入传感器或电路等,传输噪声可分为几种类型,根据其与输出信号的关系,噪声既可以是加性的,也可以是乘性的。
那什么是加性噪声呢?什么又是乘性噪声呢?
1.加性噪声 加性噪声En加到有效信号Vs中并与其混合为一个完全独立的电压(或电流),下面我给出对应的计算公式如下: 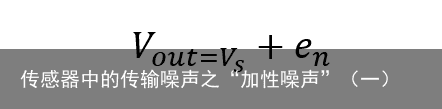
我们下面在来看看加性噪声的例子。如下图a: 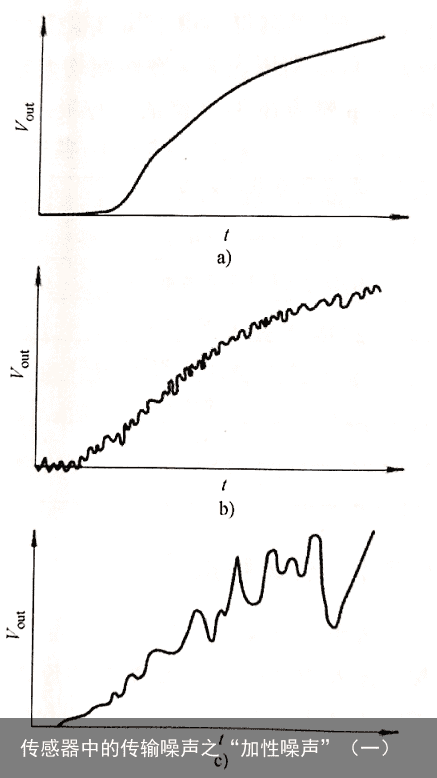 可以看到,当实际(有效)信号变化时,噪声大小不变,如果将传感器与接口电路都视作线性的,那么加性噪声的大小是与信号的大小完全独立的,而且,如果信号为0,输出噪声仍会存在。 为了提高加行传输噪声的稳定性,传感器通常都会成对使用,就是说,它们被组装成对偶形式,输出信号为两个传感器信号相减,如下图所示:
可以看到,当实际(有效)信号变化时,噪声大小不变,如果将传感器与接口电路都视作线性的,那么加性噪声的大小是与信号的大小完全独立的,而且,如果信号为0,输出噪声仍会存在。 为了提高加行传输噪声的稳定性,传感器通常都会成对使用,就是说,它们被组装成对偶形式,输出信号为两个传感器信号相减,如下图所示: 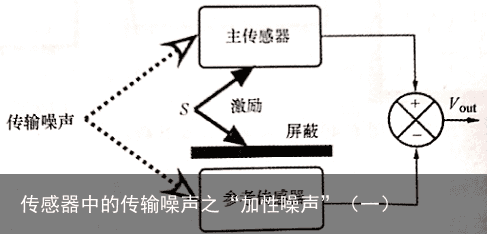 我们把这种技术称为差分技术,其中一个传感器(主传感器)受到S1激励,而另一个传感器(参考传感器)与该激励隔离,由于加性噪声专门针对线性或准线性的传感器及接口电路,因此参考传感器不需要特别激励。通常情况下,它等于0。可以预测,两个传感器以及接口电路,都会遇到同样的传输噪声(传感器内部产生的噪声不能用差分法消除)称为共模噪声,这意味着两个传感器里的噪声影响是相同的且有同样的数量级,如果二者同时受到共模杂散激励信号影响是同相的,且有同样的数量级,如果二者同时受共模杂散激励信号影响,那么噪声部分会相互抵消,这种传感器通常我们又称之为对偶或差分传感器,噪声抑制的质量由共模抑制比(CMRR)表示,具体公式如下:
我们把这种技术称为差分技术,其中一个传感器(主传感器)受到S1激励,而另一个传感器(参考传感器)与该激励隔离,由于加性噪声专门针对线性或准线性的传感器及接口电路,因此参考传感器不需要特别激励。通常情况下,它等于0。可以预测,两个传感器以及接口电路,都会遇到同样的传输噪声(传感器内部产生的噪声不能用差分法消除)称为共模噪声,这意味着两个传感器里的噪声影响是相同的且有同样的数量级,如果二者同时受到共模杂散激励信号影响是同相的,且有同样的数量级,如果二者同时受共模杂散激励信号影响,那么噪声部分会相互抵消,这种传感器通常我们又称之为对偶或差分传感器,噪声抑制的质量由共模抑制比(CMRR)表示,具体公式如下:  上式中,S1和S0分别为主传感器和参考传感器的输出信号。 CMRR取决于激励信号的大小,而且当输入信号变大时会变小。这个比率表示输出端实际激励信号相对于相同复制的共模噪声会增强多少倍。 CMRR用来表征传感器的对成度,我们为了有效抑制噪声,两个传感器应尽可能靠近,具有高度一致性且处于相同环境下,同样,参考传感器信号的可靠隔离也很重要,否则,总差分响应会减小,切记!
上式中,S1和S0分别为主传感器和参考传感器的输出信号。 CMRR取决于激励信号的大小,而且当输入信号变大时会变小。这个比率表示输出端实际激励信号相对于相同复制的共模噪声会增强多少倍。 CMRR用来表征传感器的对成度,我们为了有效抑制噪声,两个传感器应尽可能靠近,具有高度一致性且处于相同环境下,同样,参考传感器信号的可靠隔离也很重要,否则,总差分响应会减小,切记!
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:传感器中的传输噪声之“加性噪声”(一) https://www.yhzz.com.cn/a/13601.html