异步FIFO是处理多比特信号跨时钟域的最常用方法,简单来说,异步FIFO是双口RAM的一个封装而已,其存储容器本质上还是一个RAM,只不过对其添加了某些控制,使其能够实现先进先出的功能,由于这个功能十分的实用,因此得以广泛应用。 真双口RAM可以实现在一端存储,另一端读取的功能,两端的时钟可以不同,将数据存入一个容器,再取出来,这个过程在双口RAM的两端完全不存在亚稳态的问题。由于异步FIFO的实现中也存在数据的存取问题,和双口RAM类似,再加上空满信号的控制,存在跨时钟域的问题,因此只要处理好,空满信号的判断中的跨时钟域问题,就可以使用FIFO解决多比特信号的跨时钟域问题。 下面从多个方面来了解一下,异步FIFO的内容,最后会给出异步FIFO的一种普遍的实现方式及其仿真,让我们一起进入今天的内容吧。
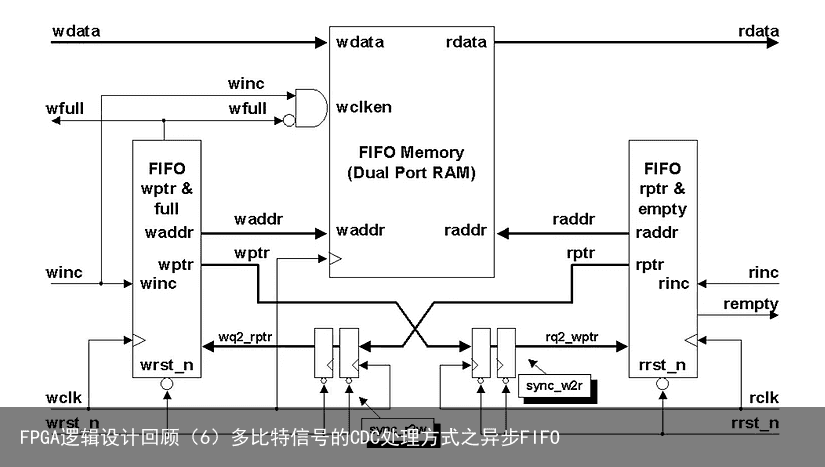
异步FIFO的概念异步FIFO的实现方式有很多种,这里说的实现方式可以理解为实现异步FIFO的技术方式,也可以指使用异步FIFO的选择方式,因为都有很多种!拿实现异步FIFO的技术方式来说,其重难点在于其空满信号的判断,它涉及到内部跨时钟域细节的实现、格雷码的转换以及空满信号的比较等。这里面的实现技术就各有不同了,但殊途同归,只能能巧妙地判断空满就可以凑合着用。下面给出一张异步FIFO的实现架构框图仅供参考:
另外,因为异步FIFO的应用已经太成熟了,手动设计起来破费一番功夫,所以FPGA各大厂家大都提供了专业的IP核供使用,功能齐全且性能良好,鲁棒性强,不用自己设计,在工程应用中,也基本都用IP核,除非想不开或者其他原因?
不妨打开Xilinx的FIFO定制页面:FIFO Generator来看:
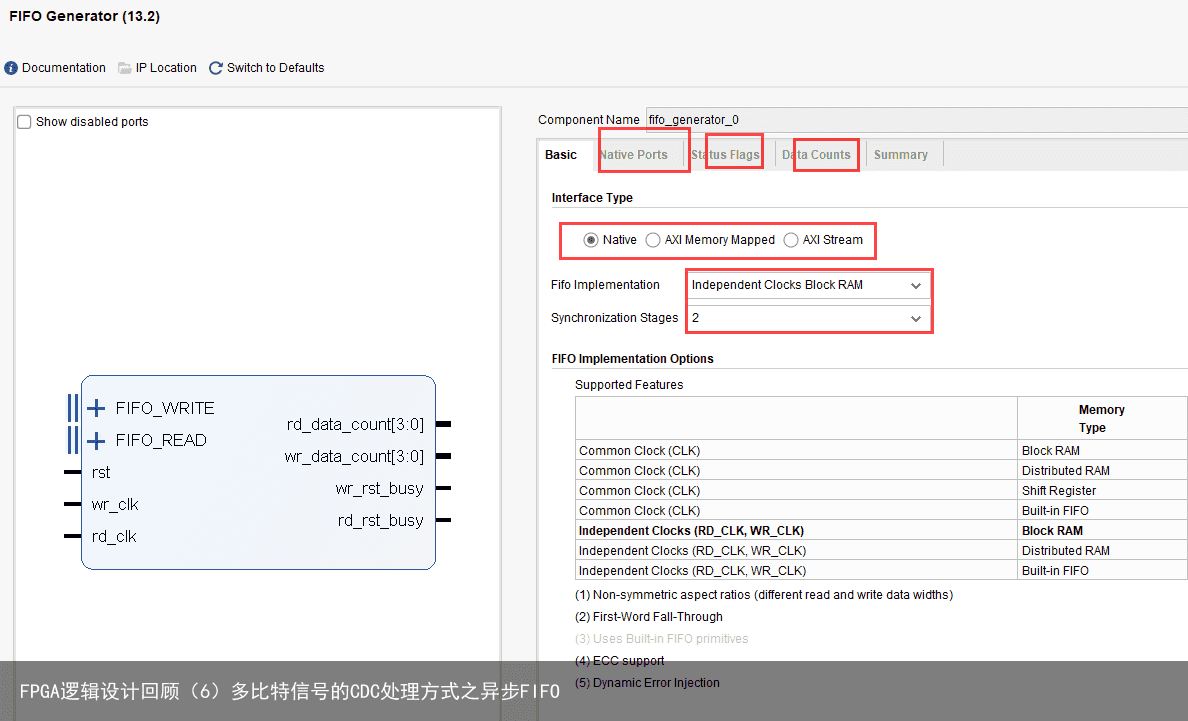
可供定制的页面确实及其丰富,各种类型的空满信号、实现的资源选择应有尽有,手动实现这些可是要费大功夫的,没有资本的推动,恐怕很难有人去做这件事吧。
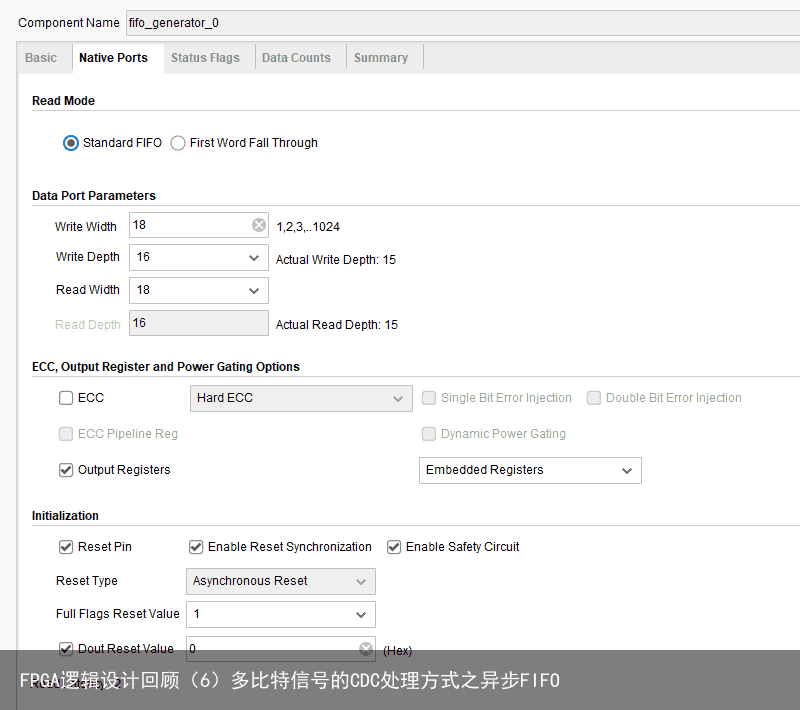
异步FIFO为什么可以解决CDC问题?异步FIFO的接口如下:
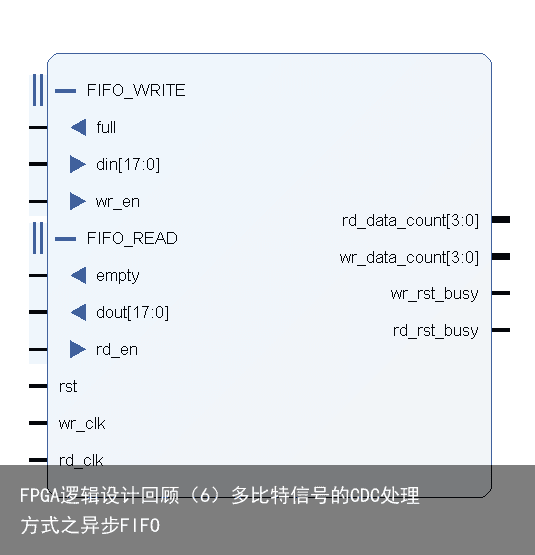
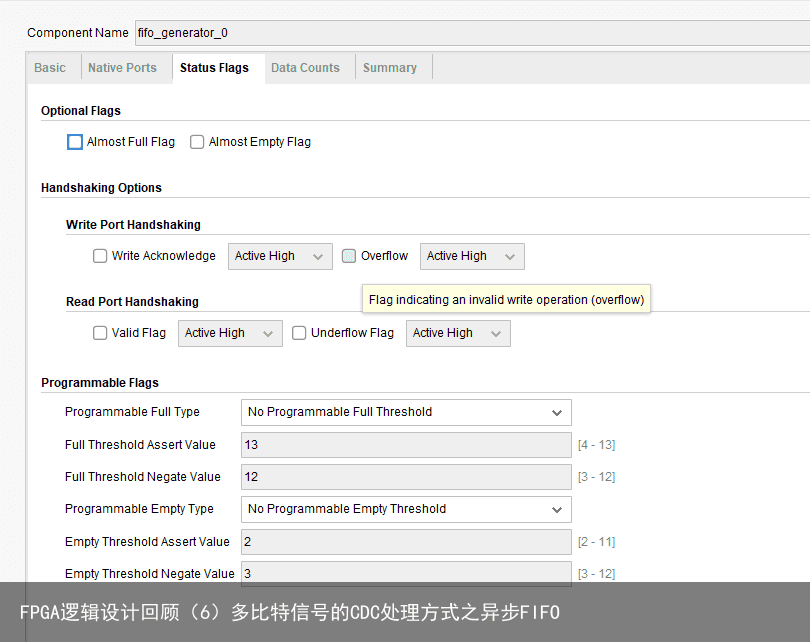
再看其资源使用情况:

以上这两张图片显示的是Xilinx的异步FIFO IP的一种定制情况,可以看到FIFO就是在RAM的基础上的一个产物,通过处理RAM的读写端口来做成先进先出的存储器,实现FIFO的功能。
对于FIFO的读写有独立的时钟,说明读写可以是不同的时钟,因此可以实现不同时钟域数据的传输。
这好像只是说明了一个结论,异步FIFO可以作为处理跨时钟域处理的方法或载体,但是异步FIFO为什么可以用来处理跨时钟域传输问题呢? 这和异步FIFO的具体实现有关!下面一起来看异步FIFO的实现!
异步FIFO的RTL实现通过RTL实现异步FIFO之前,需要明白异步FIFO的几个重要的参数,也是我们设计的重点:
FIFO的深度:通俗地说,就是异步FIFO可以存多少个数据的意思! FIFO的宽度:上面说异步FIFO的深度是表示能存放多少数据的概念,那宽度便是每个数据有多少位,也就是我们通常所说的数据有多宽! FIFO空:表示FIFO里面数据被读完了; FIFO满:表示FIFO里面填满了数据; FIFO写指针:总是指向下一个将要被写入的单元,复位时,指向第1个单元(编号为0); FIFO读指针:总是指向当前要被读出的数据,复位时,指向第1个单元(编号为0); FIFO读时钟:表示读取数据使用的时钟,一般设计时钟的上升沿为有效沿,有效沿读取数据; FIFO写时钟:表示写入数据时使用的时钟,一般上升沿为有效沿,当然也可以设计下降沿为有效沿。明白了如上的FIFO参数的概念,我们也该具体聊聊FIFO的关键细节了,例如最重要的空满判断条件: 上面也说了,FIFO空的意思是FIFO中没有了数据,可以思考,什么情况下FIFO中数据空了,其实FIFO类似一个容器,就水桶吧,倒进去的水,又全部倒了出来,水桶就是空的。FIFO也是如此,写进去的数据,又全部读了出来,表示FIFO空了。如下图:
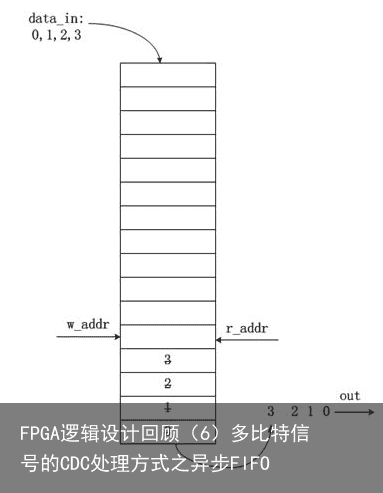
写进FIFO4个数据,又读出了4个数据,读写指针指向了同一个地方,也就是读写指针相等了,FIFO就空了。这是最简单的情况,我们其往下看: 还是用上面的图片,如果继续往FIFO内写数据,写指针不断增加,写到尽头了,指针就会从0继续增加,直到写指针回到了最初的位置,再次与读指针处于同一个位置,这时候读写指针再次相等,但是你能说FIFO还是空的吗?如下图:
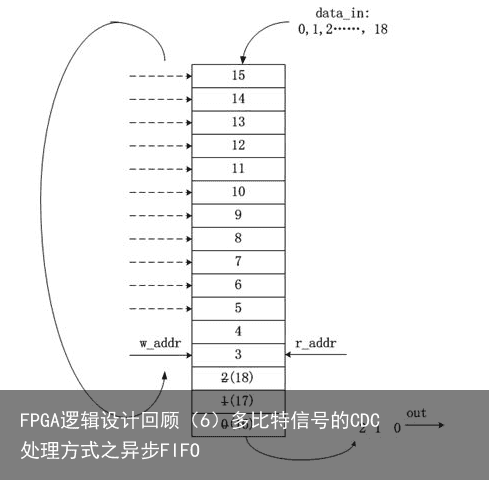
恰恰相反,此时FIFO是满的! 这就带来了我们今天异步FIFO设计的第一个问题,就是读写指针与空满条件的判断之间的关系问题?
也不是没有解决办法,最直观的便是多增加一位表示读写指针,例如FIFO的深度为8,我们原来用3位表示读写指针即可,但是我们增加到4位,这样只要读写指针的最高位不相等,即便二者剩下的其他位相等也不能表示指针相等,也就是不能说FIFO为空,相反FIFO为满。
有人可能会有这样的疑问? 还是上面的一幅图,如果FIFO满了之后,继续写数据,再来一圈,FIFO的读写指针不就又完全相等了吗? 其实,这很好办,我们在设计FIFO的时候,判断FIFO为空的话就规定不能再读了,如果FIFO为满的话,就不能再继续写了,这就解决了这个疑问!
接着还需要讨论一个问题,如FIFO实现的框图: 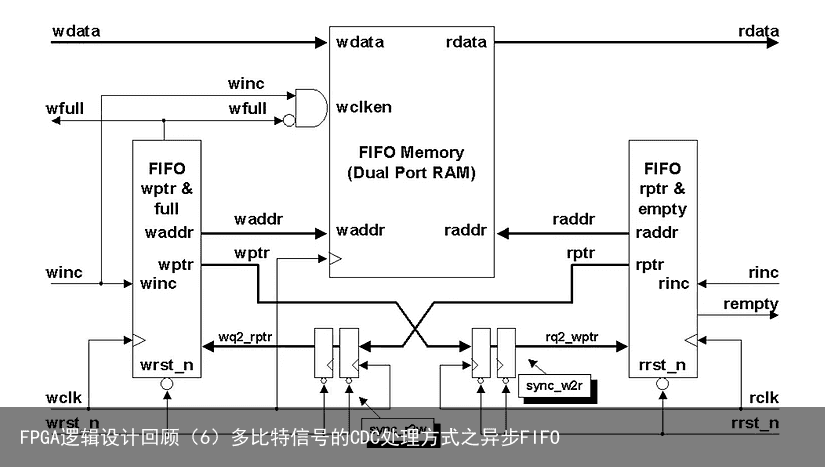
如上图,判断FIFO的空满,需要读写指针跨时钟域传输,之后对比读写指针的大小,这就存在一个问题,那就是我们所说的跨时钟域问题,在这里具体来说便是读写指针的跨时钟域问题? 怎么处理呢?由于读写指针有多位,对于多比特数据的CDC问题,我们一般不会直接两级同步过去,两级同步适用于单比特变化的数据! 但是如上图的实现方式,好像还就是两级同步,这是什么原因呢?
如果非要使用两级寄存器同步的方式,我们就要控制每次只有1比特数据发生变化,如何实现呢? 很容易,使用格雷码对读写指针计数值进行编码即可。
如下图:
可见,格雷码的每一次叠加只会发生1比特数据的变化。 在异步FIFO的实现中,读写指针的变化,我们仍然使用二进制加,之后将变化后的二进制通过组合逻辑转换为格雷码即可。 二进制转换为格雷码以及格雷码转换为二进制的方法,我们可以参考我以前的博文:二进制与格雷码之间的转换的Verilog实现(更多一点的讨论),这篇文章还顺便提到了generate for以及for语句的区别,推荐阅读。
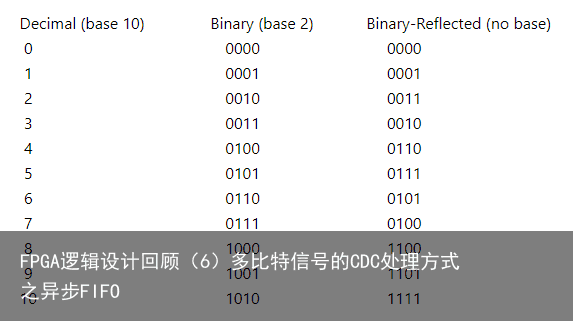
这里为了后面的RTL编码铺垫,给出二进制编码与格雷码之间的转换示意图,避免翻阅的麻烦:
二进制转换为格雷码的方法: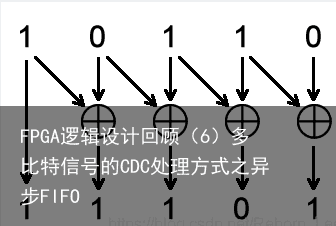
伪代码描述为:
assign gray_value = binary_value ^ (binary_value>>1); 格雷码转换为二进制码的方法: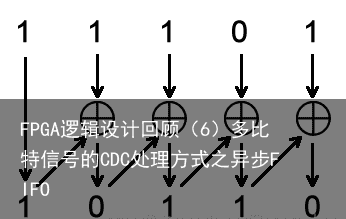
如上图,可以看出,可以从高位入手,格雷码的最高位即是二进制码的最高位,之后的二进制码的实现便是它本身的高1位与该位的格雷码进行异或,如下伪代码描述:
assign bin[N-1] = gray[N-1]; genvar i; generate for(i = N-2; i >= 0; i = i – 1) begin: gray_2_bin assign bin[i] = bin[i + 1] ^ gray[i]; end endgenerateOK,解决了二进制码向格雷码的转换问题,我们继续分析: 二进制码转换成了格雷码并跨时钟域到了另一个时钟域,那接下来就是读写指针的格雷码形式的对比了,二进制的对比很简单,就是如果二者所有的位全部相等, 则表示空;如果二者最高位不同,但其他位相同,则表示满。 上述判断方法为二进制判断空满的方法,那么格雷码呢? 我们分情况讨论:
对于空的判断:这就很简单,二进制完全相同,难道格雷码不完全相等吗?对的,同样完全相同表示空。 对于满的判断:从上面的格雷码与二进制码之间的转换可以确定一点,就是二者的最高位一致,因此当二进制码的最高位不等的时候,格雷码也一定不等,这一点毋庸置疑;同样由二者转换的原理图看出,由于二进制码时,二者的最高位不同,其余为相同,如下图: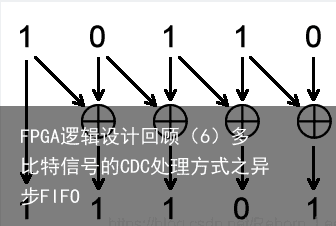
二进制转换为格雷码的时候,次高位的格雷码和最高位相关,因此,二者的次高位一定不同,由于二进制码的次高位相同,因此次次高位相同,以此类推,剩余的更低位在二进制编码以及格雷码中完全相同。 这就得出了结论,在格雷码编码中确定满的条件是最高位,次高位都不同,但是其余位相同。
如下图:
0和8,1和9等,由于其二进制码的最高位不同,其余位相同,但是格雷码确是最高位和次高位都不同, 其余位相同。 这个问题到此就当做解决了。
难题都已经解决,下面就是异步FIFO的RTL实现工作了。
如果你读懂了上述的分析过程,那么本设计就十分清晰明了了,下面给出RTL设计:
module asyn_fifo#( parameter DATA_WIDTH = 8, parameter DATA_DEPTH = 32 )( //write ports input wr_clk, input wr_rst, input wr_en, input [DATA_WIDTH – 1 : 0] wr_data, output reg full, //read ports input rd_clk, input rd_rst, input rd_en, output reg [DATA_WIDTH – 1 : 0] rd_data, output reg empty ); // define FIFO buffer reg [DATA_WIDTH – 1 : 0] fifo_buffer[0 : DATA_DEPTH – 1]; //define the write and read pointer and //pay attention to the size of pointer which should be greater one to normal reg [$clog2(DATA_DEPTH) : 0] wr_pointer = 0, rd_pointer = 0; //write data to fifo buffer and wr_pointer control always@(posedge wr_clk) begin if(wr_rst) begin wr_pointer <= 0; end else if(wr_en) begin wr_pointer <= wr_pointer + 1; fifo_buffer[wr_pointer] <= wr_data; end end //read data from fifo buffer and rd_pointer control always@(posedge rd_clk) begin if(rd_rst) begin rd_pointer <= 0; end else if(rd_en) begin rd_pointer <= rd_pointer + 1; rd_data <= fifo_buffer[rd_pointer]; end end //wr_pointer and rd_pointer translate into gray code wire [$clog2(DATA_DEPTH) : 0] wr_ptr_g, rd_ptr_g; assign wr_ptr_g = wr_pointer ^ (wr_pointer >>> 1); assign rd_ptr_g = rd_pointer ^ (rd_pointer >>> 1); //wr_pointer after gray coding synchronize into read clock region reg [$clog2(DATA_DEPTH) : 0] wr_ptr_gr, wr_ptr_grr, rd_ptr_gr, rd_ptr_grr; always@(rd_clk) begin if(rd_rst) begin wr_ptr_gr <= 0; wr_ptr_grr <= 0; end else begin wr_ptr_gr <= wr_ptr_g; wr_ptr_grr <= wr_ptr_gr; end end //rd_pointer after gray coding synchronize into write clock region always@(wr_clk) begin if(wr_rst) begin rd_ptr_gr <= 0; rd_ptr_grr <= 0; end else begin rd_ptr_gr <= rd_ptr_g; rd_ptr_grr <= rd_ptr_gr; end end // judge full or empty always@(posedge rd_clk) begin if(rd_rst) empty <= 0; else if(wr_ptr_grr == rd_ptr_g) begin empty <= 1; end else empty <= 0; end always@(posedge wr_clk) begin if(wr_rst) full <= 0; else if( (rd_ptr_grr[$clog2(DATA_DEPTH) – 2 : 0] == wr_ptr_g[$clog2(DATA_DEPTH) – 2 : 0]) && ( rd_ptr_grr[$clog2(DATA_DEPTH)] != wr_ptr_g[$clog2(DATA_DEPTH)] ) && ( rd_ptr_grr[$clog2(DATA_DEPTH) – 1] != wr_ptr_g[$clog2(DATA_DEPTH) – 1] ) ) begin full <= 1; end else full <= 0; end //对写满的限制 always@(posedge wr_clk or posedge wr_rst) begin if(wr_rst) begin wr_pointer <= 0; end else if(wr_en) begin if(!((rd_ptr_grr[$clog2(DATA_DEPTH) – 2 : 0] == wr_ptr_g[$clog2(DATA_DEPTH) – 2 : 0]) && ( rd_ptr_grr[$clog2(DATA_DEPTH)] != wr_ptr_g[$clog2(DATA_DEPTH)] ) && ( rd_ptr_grr[$clog2(DATA_DEPTH) – 1] != wr_ptr_g[$clog2(DATA_DEPTH) – 1] ))) begin wr_pointer <= wr_pointer + 1; end else begin wr_pointer <= wr_pointer; end end else begin wr_pointer <= wr_pointer; end end //对读空的限制 always@(posedge rd_clk or posedge rd_rst) begin if(rd_rst) begin rd_pointer <= 0; end else if(rd_en) begin if(wr_ptr_grr != rd_ptr_g) begin rd_pointer <= rd_pointer + 1; end else begin rd_pointer <= rd_pointer; end end else begin rd_pointer <= rd_pointer; end end endmodule这个程序唯一需要注意的是,最后对空满以后,读写指针的处理,例如:
//对读空的限制 always@(posedge rd_clk or posedge rd_rst) begin if(rd_rst) begin rd_pointer <= 0; end else if(rd_en) begin if(wr_ptr_grr != rd_ptr_g) begin rd_pointer <= rd_pointer + 1; end else begin rd_pointer <= rd_pointer; end end else begin rd_pointer <= rd_pointer; end end读空了以后,读指针就不会再增加了。
//对写满的限制 always@(posedge wr_clk or posedge wr_rst) begin if(wr_rst) begin wr_pointer <= 0; end else if(wr_en) begin if(!((rd_ptr_grr[$clog2(DATA_DEPTH) – 2 : 0] == wr_ptr_g[$clog2(DATA_DEPTH) – 2 : 0]) && ( rd_ptr_grr[$clog2(DATA_DEPTH)] != wr_ptr_g[$clog2(DATA_DEPTH)] ) && ( rd_ptr_grr[$clog2(DATA_DEPTH) – 1] != wr_ptr_g[$clog2(DATA_DEPTH) – 1] ))) begin wr_pointer <= wr_pointer + 1; end else begin wr_pointer <= wr_pointer; end end else begin wr_pointer <= wr_pointer; end end写满了以后,写指针就不会增加了。
其实这个不加上也可以,我们在使用的时候,通过判断空满条件来决定要不要让读写使能继续有效,同样可以达到控制数据读写的不溢出的问题。
下面简单搭建一个仿真平台,仿真出空满信号的发生:
module asyn_fifo_tb( ); parameter DATA_WIDTH = 8; parameter DATA_DEPTH = 16; //write ports reg wr_clk; reg wr_rst; reg wr_en; reg [DATA_WIDTH – 1 : 0] wr_data; wire full; //read ports reg rd_clk; reg rd_rst; reg rd_en; wire [DATA_WIDTH – 1 : 0] rd_data; wire empty; initial begin wr_clk = 0; forever begin #2 wr_clk = ~wr_clk; end end initial begin rd_clk = 0; forever begin #5 rd_clk = ~rd_clk; end end initial begin wr_rst = 1b1; rd_rst = 1b1; wr_en = 1b0; rd_en = 1b0; #10 wr_rst = 0; rd_rst = 0; #10 wr_en = #(0.2) 1b1; wr_data = #(0.2) $random; repeat(5) begin @(posedge wr_clk); wr_data = #(0.2) $random; end @(posedge wr_clk); wr_en = #(0.2) 1b0; wr_data = #(0.2) $random; #10 rd_en = #(0.2) 1b1; repeat(5) begin @(posedge rd_clk); end @(posedge rd_clk); rd_en = #(0.2) 1b0; #10 wr_en = #(0.2) 1b1; wr_data = #(0.2) $random; repeat(16) begin @(posedge wr_clk); wr_data = #(0.2) $random; end @(posedge wr_clk); wr_en = #(0.2) 1b0; wr_data = #(0.2) $random; end asyn_fifo#( .DATA_WIDTH ( DATA_WIDTH ), .DATA_DEPTH ( DATA_DEPTH ) )u_asyn_fifo( .wr_clk ( wr_clk ), .wr_rst ( wr_rst ), .wr_en ( wr_en ), .wr_data ( wr_data ), .full ( full ), .rd_clk ( rd_clk ), .rd_rst ( rd_rst ), .rd_en ( rd_en ), .rd_data ( rd_data ), .empty ( empty ) ); endmodule下面是仿真结果分析:
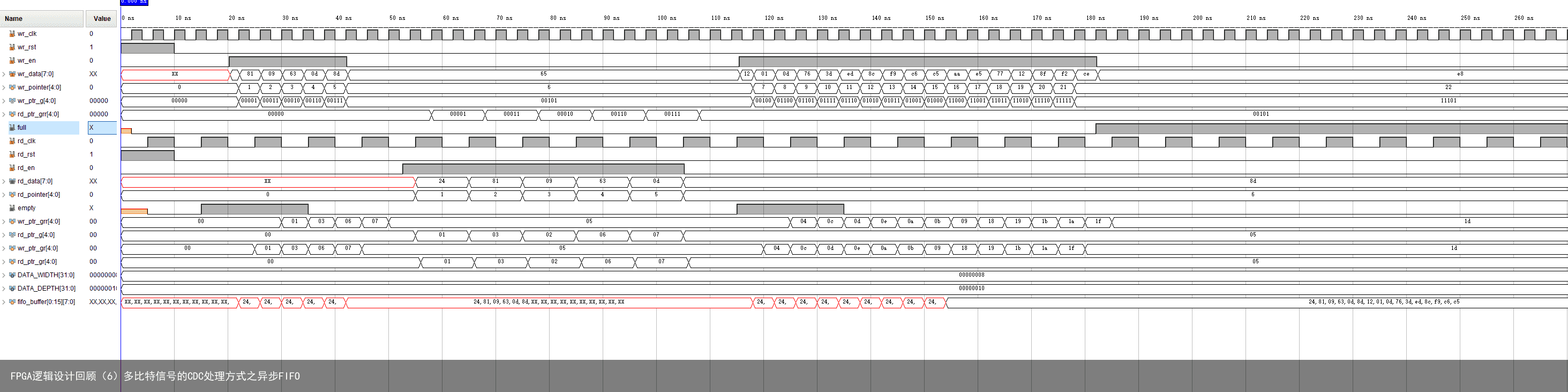
下面给出空满时刻的注释: 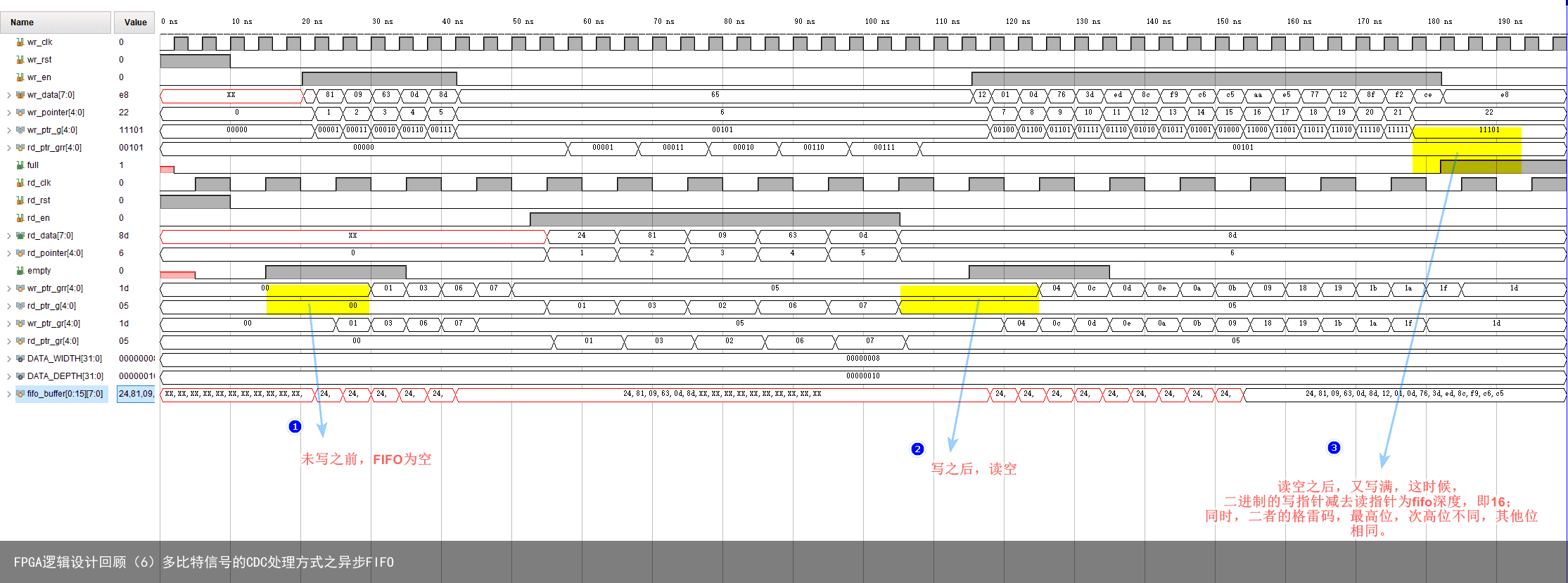
最后想说的是,手动设计的异步FIFO只是为了让你了解异步FIFO的原理,但对于FPGA工程师来说,我们掌握了不代表平时一定要用自己写的异步FIFO,一般或者往往我们会使用fpga厂家自带的FIFO IP核,别人写好的模块,经过了严格的验证,让设计更加的稳定,且功能很多,如果偏要使用自己设计的FIFO,那么,后果自负吧。
参考资料
Gray Code Basics
二进制与格雷码之间的转换的Verilog实现(更多一点的讨论)
Verilog code for FIFO memory
FPGA基础知识极简教程(4)从FIFO设计讲起之异步FIFO篇
异步FIFO的FPGA实现
Getting the basic FIFO right
調試成功的簡單異步FIFO–verilog實現+testbench
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:FPGA逻辑设计回顾(6)多比特信号的CDC处理方式之异步FIFO https://www.yhzz.com.cn/a/13230.html