一. 业务背景
在我们的某项业务中,需要通过自研的智能硬件“自动化”地拍摄一组组手机的照片,这些照片有时候因为光照的因素需要考虑将背景的颜色整体替换掉,然后再呈现给 C 端用户。这时就有背景替换的需求了。 二. 技术实现
使用 OpenCV ,通过传统的图像处理来实现这个需求。 方案一:
首先想到的是使用 K-means 分离出背景色。 大致的步骤如下: 将二维图像数据线性化 使用 K-means 聚类算法分离出图像的背景色 将背景与手机二值化 使用形态学的腐蚀,高斯模糊算法将图像与背景交汇处高斯模糊化 替换背景色以及对交汇处进行融合处理 k-平均算法(英文:k-means clustering)源于信号处理中的一种向量量化方法,现在则更多地作为一种聚类分析方法流行于数据挖掘领域。k-平均聚类的目的是:把 n 个点(可以是样本的一次观察或一个实例)划分到k个聚类中,使得每个点都属于离他最近的均值(此即聚类中心)对应的聚类,以之作为聚类的标准。这个问题将归结为一个把数据空间划分为Voronoi cells的问题。 K-means 算法思想为:给定n个数据点{x1,x2,…,xn},找到K个聚类中心{a1,a2,…,aK},使得每个数据点与它最近的聚类中心的距离平方和最小,并将这个距离平方和称为目标函数,记为Wn,其数学表达式为:  K-means 算法基本流程: 初始的 K 个聚类中心。 按照距离聚类中心的远近对所有样本进行分类。 重新计算聚类中心,判断是否退出条件:两次聚类中心的距离足够小视为满足退出条件;不退出则重新回到步骤2。 int main() {
K-means 算法基本流程: 初始的 K 个聚类中心。 按照距离聚类中心的远近对所有样本进行分类。 重新计算聚类中心,判断是否退出条件:两次聚类中心的距离足够小视为满足退出条件;不退出则重新回到步骤2。 int main() {
} 
方案二:
方案一的算法并不是对所有手机都有效,对于一些浅色的、跟背景颜色相近的手机,该算法会比较无能为力。 
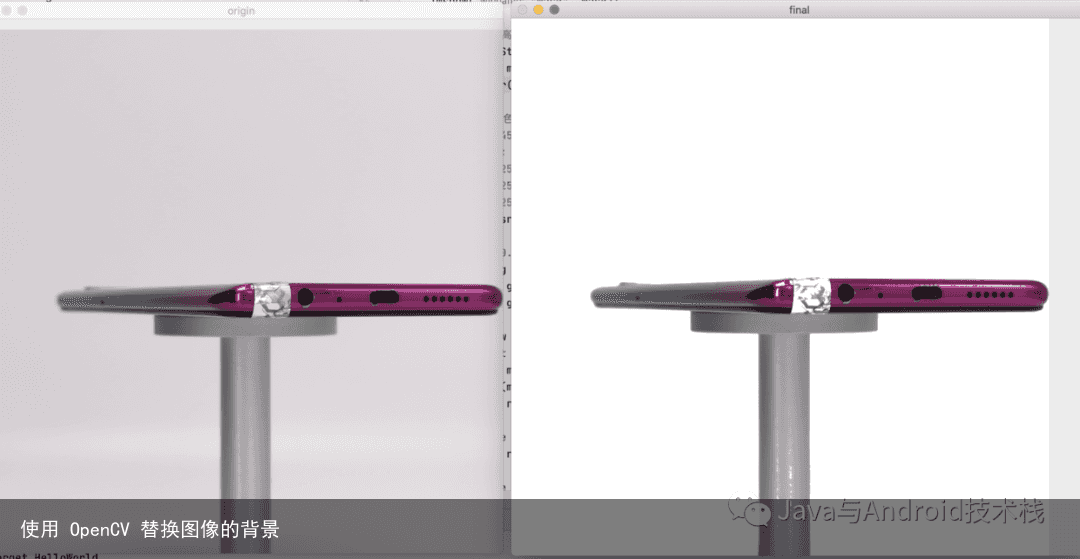
于是换一个思路: 使用 USM 锐化算法对图像增强 再用纯白色的图片作为背景图,和锐化之后的图片进行图像融合。 图像锐化是使图像边缘更加清晰的一种图像处理方法。 USM(Unsharpen Mask) 锐化的算法就是对原图像先做一个高斯模糊,然后用原来的图像减去一个系数乘以高斯模糊之后的图像,然后再把值 Scale 到0~255的 RGB 素值范围之内。基于 USM 锐化的算法可以去除一些细小的干扰细节和噪声,比一般直接使用卷积锐化算子得到的图像锐化结果更加真实可信。 int main() { Mat src = imread(“./test.jpg”); if (src.empty()) { printf(“could not load image…\n”); return -1; } namedWindow(“src”, WINDOW_AUTOSIZE); imshow(“origin”, src);
Mat blur_img, usm; GaussianBlur(src, blur_img, Size(0, 0), 25); addWeighted(src, 1.5, blur_img, -0.5, 0, usm); imshow(“usm”, usm); Mat roi = Mat(Size(src.cols,src.rows), CV_8UC3, Scalar(255, 255, 255)); Mat dst; addWeighted(usm, 1.275, roi, 0.00015, 0, dst); imshow(“final”, dst); waitKey(0); return 0;} 其中,addWeighted 函数是将两张大小相同、类型相同的图片进行融合。数学公式如下:
三. 总结
其实,我尝试过用 OpenCV 多种方式实现该功能,也尝试过使用深度学习实现。目前还没有最满意的效果。后续,我会更偏向于使用深度学习来实现该功能。
来源:opencv学堂
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:使用 OpenCV 替换图像的背景 https://www.yhzz.com.cn/a/13017.html