【深度学习】移动翻转瓶颈卷积的实现(mobile inverted bottleneck convolution)
文章目录 1 MBConv 1.1 Depthwise Convolution 1.2 SE-Net 1.3 EfficientNet-B0网络结构 2 卷积层的变体和替代 3 MobileNetV3 1 MBConv移动翻转瓶颈卷积(mobile inverted bottleneck convolution,MBConv),类似于 MobileNetV2 和 MnasNet,由深度可分离卷积Depthwise Convolution和SENet构成。
每个MBConv的网络结构如下: MBConv = 1×1升维 + Depthwise Convolution + SENet + 1×1降维 + add 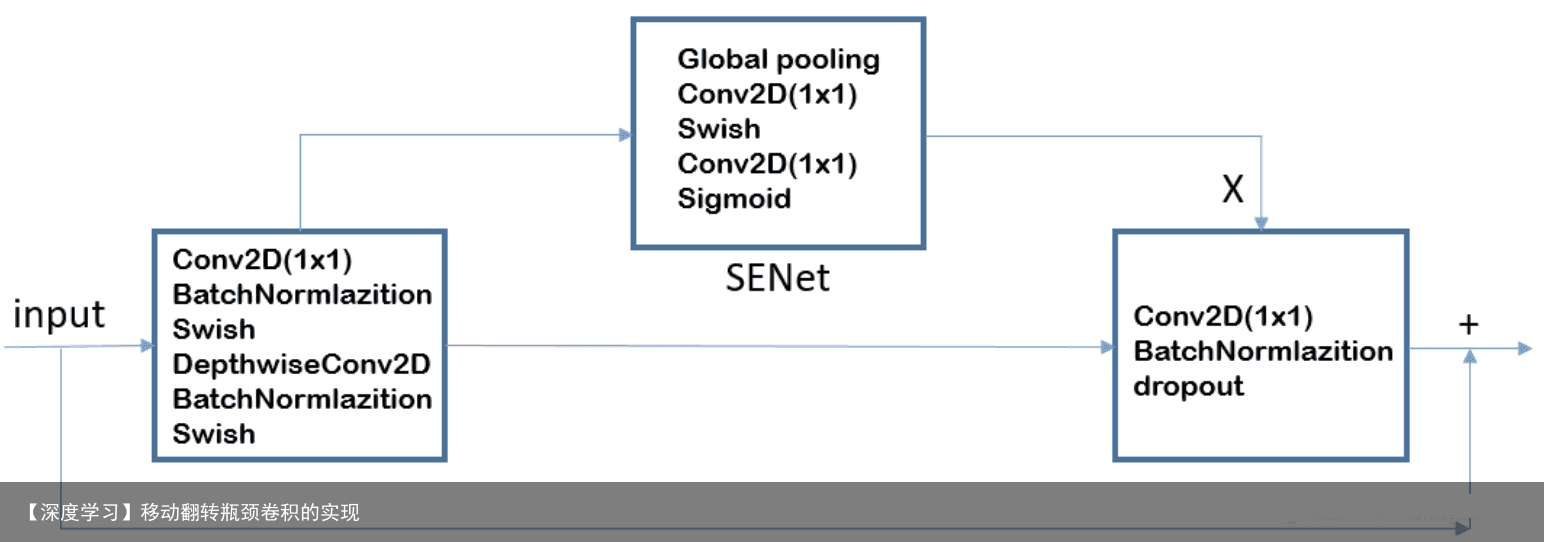
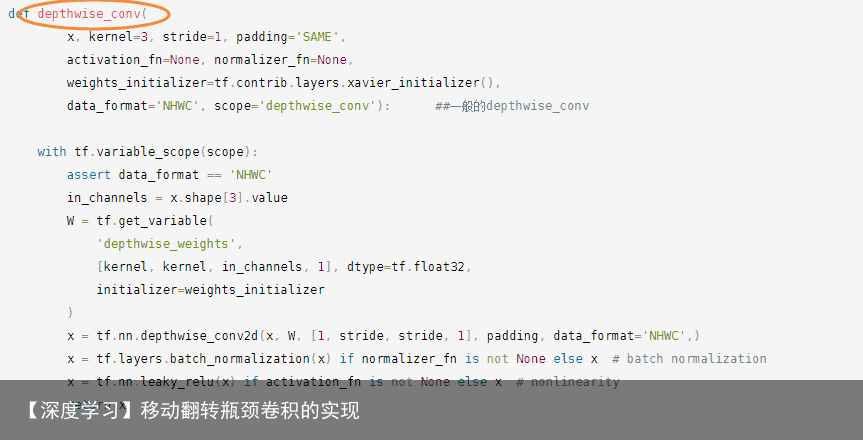
1.1 Depthwise Convolution


1.2 SE-Net
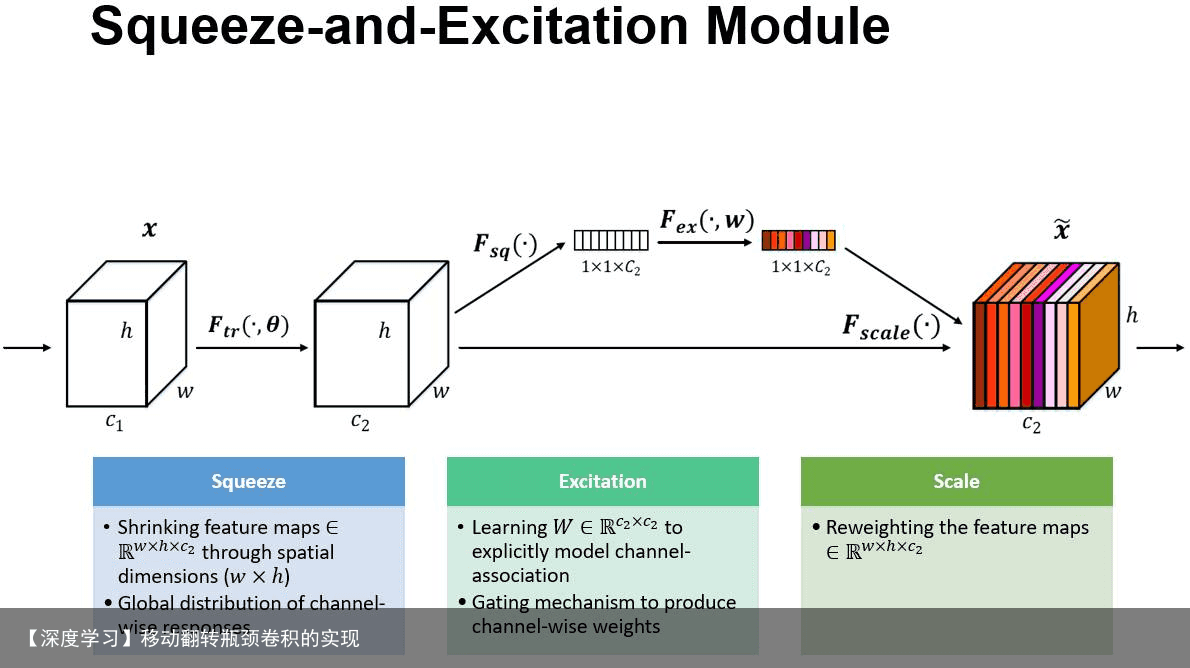 上图是我们提出的 SE 模块的示意图。给定一个输入 x,其特征通道数为 c_1,通过一系列卷积等一般变换后得到一个特征通道数为 c_2 的特征。与传统的 CNN 不一样的是,接下来我们通过三个操作来重标定前面得到的特征。
上图是我们提出的 SE 模块的示意图。给定一个输入 x,其特征通道数为 c_1,通过一系列卷积等一般变换后得到一个特征通道数为 c_2 的特征。与传统的 CNN 不一样的是,接下来我们通过三个操作来重标定前面得到的特征。
首先是 Squeeze 操作,我们顺着空间维度来进行特征压缩,将每个二维的特征通道变成一个实数,这个实数某种程度上具有全局的感受野,并且输出的维度和输入的特征通道数相匹配。它表征着在特征通道上响应的全局分布,而且使得靠近输入的层也可以获得全局的感受野,这一点在很多任务中都是非常有用的。
其次是 Excitation 操作,它是一个类似于循环神经网络中门的机制。通过参数 w 来为每个特征通道生成权重,其中参数 w 被学习用来显式地建模特征通道间的相关性。
最后是一个 Reweight 的操作,我们将 Excitation 的输出的权重看做是进过特征选择后的每个特征通道的重要性,然后通过乘法逐通道加权到先前的特征上,完成在通道维度上的对原始特征的重标定。
1.3 EfficientNet-B0网络结构
1.该网络结构 = 16个MBConv + 2个Conv + 1个Global average pooling + 1个FC分类层; 2.该网络利用了移动翻转瓶颈卷积(mobile inverted bottleneck convolution,MBConv)模块,还引入了压缩与激发网络(Squeeze-and-Excitation Network,SENet)的注意力思想。
网络整体结构如下: 基线B0的16个Block结构如下:
BlockArgs(kernel_size=3, num_repeat=1, input_filters=32, output_filters=16, expand_ratio=1, id_skip=True, strides=[1, 1], se_ratio=0.25), BlockArgs(kernel_size=3, num_repeat=2, input_filters=16, output_filters=24, expand_ratio=6, id_skip=True, strides=[2, 2], se_ratio=0.25), BlockArgs(kernel_size=5, num_repeat=2, input_filters=24, output_filters=40, expand_ratio=6, id_skip=True, strides=[2, 2], se_ratio=0.25), BlockArgs(kernel_size=3, num_repeat=3, input_filters=40, output_filters=80, expand_ratio=6, id_skip=True, strides=[2, 2], se_ratio=0.25), BlockArgs(kernel_size=5, num_repeat=3, input_filters=80, output_filters=112, expand_ratio=6, id_skip=True, strides=[1, 1], se_ratio=0.25), BlockArgs(kernel_size=5, num_repeat=4, input_filters=112, output_filters=192, expand_ratio=6, id_skip=True, strides=[2, 2], se_ratio=0.25), BlockArgs(kernel_size=3, num_repeat=1, input_filters=192, output_filters=320, expand_ratio=6, id_skip=True, strides=[1, 1], se_ratio=0.25) 2 卷积层的变体和替代在MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications 中提出将Conv + BN + ReLU分解为DepthwiseConv + BN +ReLU + PointwiseConv + BN + ReLU. 这就是一个深度可分离卷积神经网络哦~~~还不是完整的MNConv。 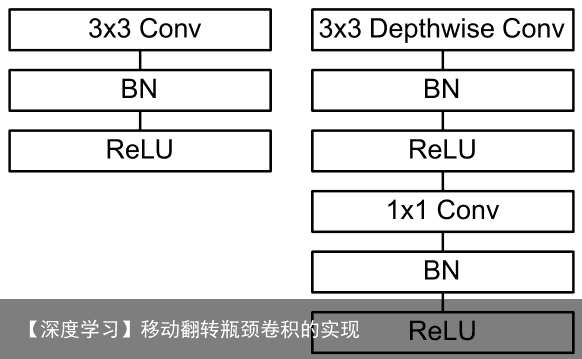 Xception 使用了去掉中间激活函数的变体.
Xception 使用了去掉中间激活函数的变体.
在MobileNetV2中DepthwiseConv被整合到一般的残差结构中用于取代中间的卷积操作, 并去掉了最后一个激活函数. 此外, 与原本先降维再升维相反, 新的残差结构先对输入进行升维. 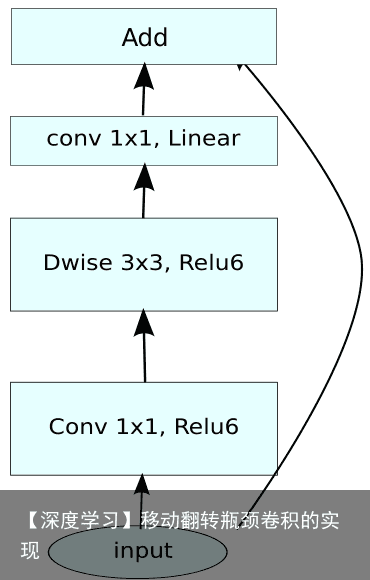 SE结构在MobileNetV3中被有选择性地加到DepthwiseConv这一层上.
SE结构在MobileNetV3中被有选择性地加到DepthwiseConv这一层上.
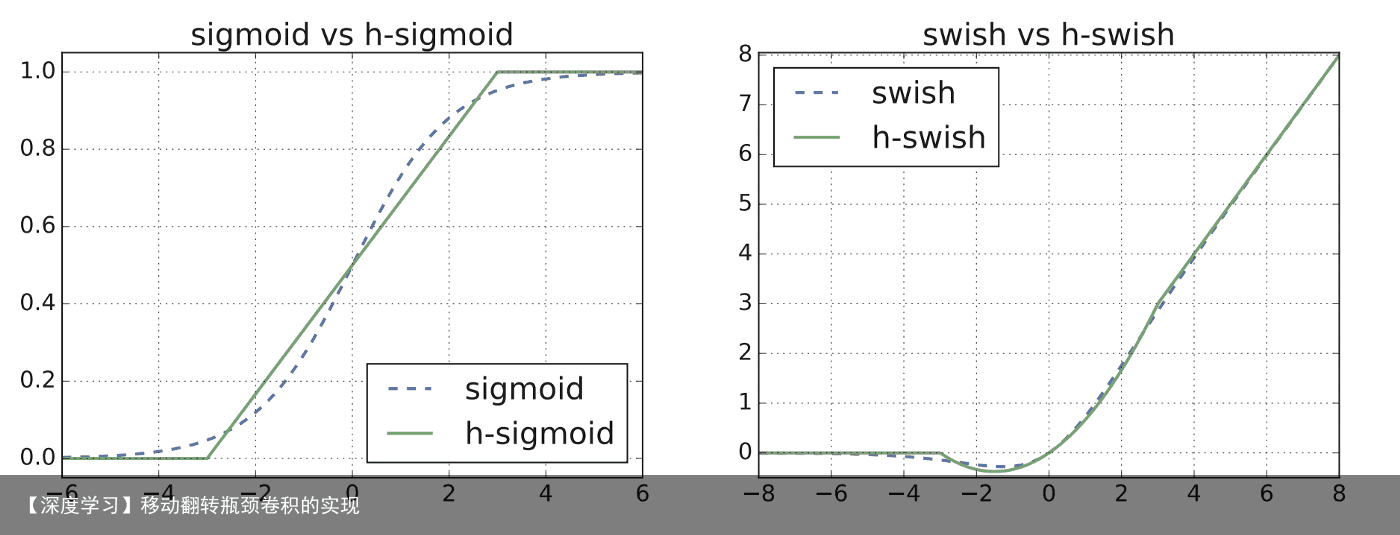
MobilenetV3继承V1 的 Depthwise separable convolution、V2的先放大再收缩的概念,并加入了Squeeze-and-Excitation Networks,所以整个架构上与EfficientNet的MBConvBlock很相似。 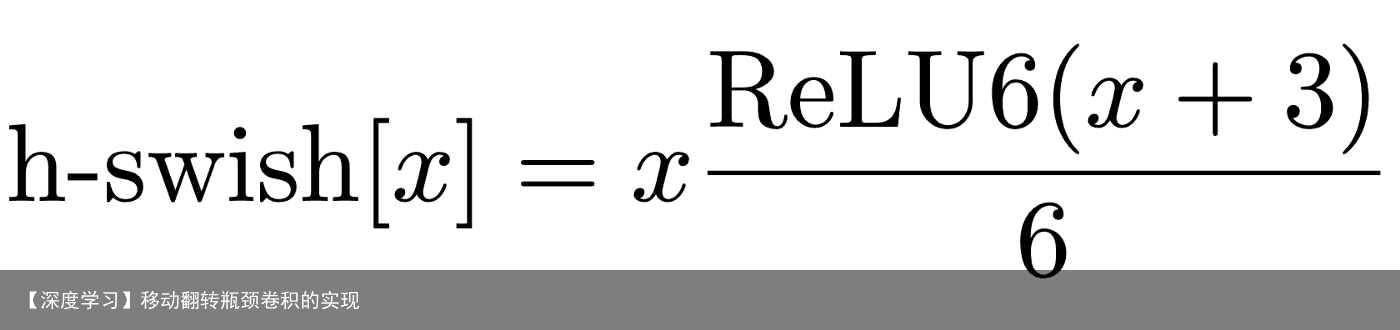
 下图为MobileNetV3与 V2的比较图,可以发现相同Latency下,V3模型在Top-1 Accuracy上都较胜出。
下图为MobileNetV3与 V2的比较图,可以发现相同Latency下,V3模型在Top-1 Accuracy上都较胜出。 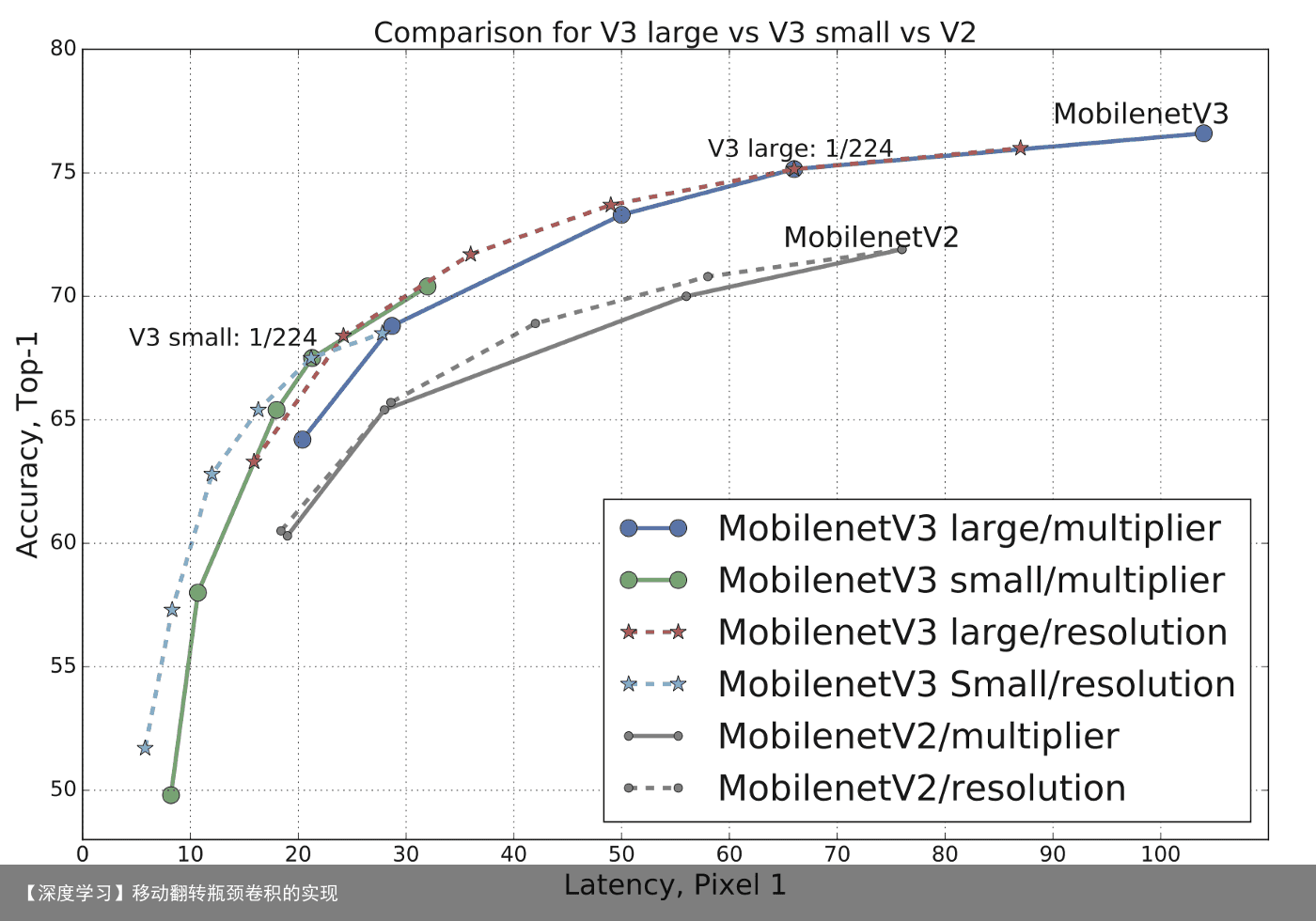 代码实现Bottleneck:
代码实现Bottleneck:
MobileNet:引入Depthwise Separable Convolution (DWConv) MobileNetv2:在DWConv基础上引入inverted residuals and linear bottlenecks 作者提出了MobileNetV3-Large和MobileNetV3-Small两种不同大小的网络结构。
4 代码分析以下代码主要实现深度可分离卷积。
 以下代码实现压缩和激励模块。
以下代码实现压缩和激励模块。 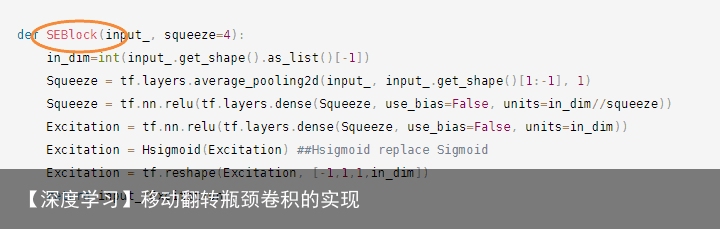 这与MBConv的实现是类似的。 MnasNet结构分析: 模型使用更多 5×5 depthwise convolutions。对于 depthwise separable convolution, 一个 5×5 卷积核比两个 3×3 卷积核更高效:
这与MBConv的实现是类似的。 MnasNet结构分析: 模型使用更多 5×5 depthwise convolutions。对于 depthwise separable convolution, 一个 5×5 卷积核比两个 3×3 卷积核更高效:
假如输入分辨率为(H,W,M),输出分辨率为(H,W,N),C5x5 和 C3x3 分别代表 5×5 卷积核和 3×3 卷积核计算量,通过计算可以看到,N>7 时,C5x5 计算效率大于 C3x3 计算效率: 层分级的重要性。很多轻量化模型重复 block 架构,只改变滤波器尺寸和空间维度。论文提出的层级搜索空间允许模型的各个 block 包括不同的卷积层。轮的ablation study比较了 MnasNet 的各种变体(即单独重复使用各个 block),在准确率和实时性方面难以达到平衡,验证了层分级的重要性。
个人观点:论文使用强化学习的思路,首先确定了 block 的连接方式,在每个 block 使用层级搜索空间,确定每个卷积层的卷积类型,卷积核、跳跃层连接方式,滤波器的尺寸等。如果让强化学习自己选择模型的架构,比如 Encoder-Decoder,U-Net,FPN 等,是否在目标检测语义分割方面有更好的表现。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:【深度学习】移动翻转瓶颈卷积的实现 https://www.yhzz.com.cn/a/12441.html