【深度学习】如何从结构出发更好的改进一个神经网络
文章目录 1 降采样和升采样 2 UNet++模型诞生 3 参数多了是导致UNet++比UNet好吗 4 一些思路 5 改进卷积结构 5.1 转置卷积 5.2 空洞卷积 5.3 Depth-wise Convolution 5.4 MBConv 5.5 高效的Unet 5.6 基于keras的代码实现 1 降采样和升采样第一个问题: 降采样对于分割网络到底是不是必须的?问这个问题的原因就是,既然输入和输出都是相同大小的图,为什么要折腾去降采样一下再升采样呢?
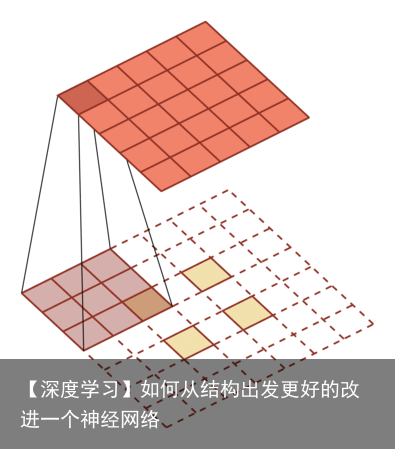
理论回答是这样的: 降(下)采样的理论意义,它可以增加对输入图像的一些小扰动的鲁棒性,比如图像平移,旋转等,减少过拟合的风险,降低运算量,和增加感受野的大小。升(上)采样的最大的作用其实就是把抽象的特征再还原解码到原图的尺寸,最终得到分割结果。如下图所示: 浅层结构可以抓取图像的一些简单的特征,比如边界,颜色,而深层结构因为感受野大了,而且经过的卷积操作多了,能抓取到图像的一些说不清道不明的抽象特征,讲的越来越玄学了,总之,浅有浅的侧重,深有深的优势.
多深才好?U-Net为什么只在4层以后才返回去?问题实际是这样的,下图所示,既然 X1,0 、X2,0、 X3,0 、X4,0所抓取的特征都很重要,为什么我非要降到 X4,0 层了才开始上采样回去呢? 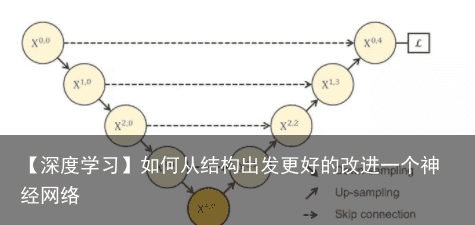
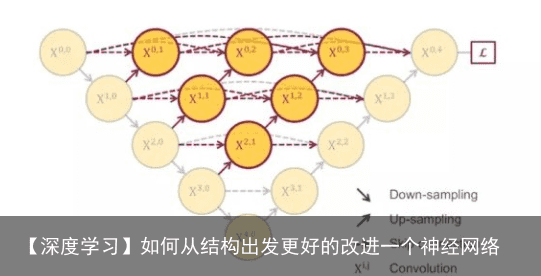
这个综合长连接和短连接的方案就是作者他们在MICCAI中发表的UNet++,也就是说这里的短连接是为了使模型能够得到训练,然后长连接是获得更多信息.
 (UNet++和刚刚说的那个CVPR的论文结构也太像了吧,这个工作和UC Berkeley的研究是完全两个独立的工作,也算是一个美丽的巧合。UNet++在年初时思路就已经成型了,CVPR那篇是我们七月份开会的时候看到的,当时UNet++已经被录用了,所以相当于同时提出。另外,和CVPR的那篇论文相比,作者还有一个更精彩的点埋在后面说,刚刚也留了一个伏笔)
(UNet++和刚刚说的那个CVPR的论文结构也太像了吧,这个工作和UC Berkeley的研究是完全两个独立的工作,也算是一个美丽的巧合。UNet++在年初时思路就已经成型了,CVPR那篇是我们七月份开会的时候看到的,当时UNet++已经被录用了,所以相当于同时提出。另外,和CVPR的那篇论文相比,作者还有一个更精彩的点埋在后面说,刚刚也留了一个伏笔)
UNet++的效果是比UNet好,从网络结构上看,说白了就是把原来空心的U-Net填满了
所以有人会认为是参数多了才导致效果好,而不是网络结构的增加.怎么反驳这个呢?
为了回答这个问题,同样作者又去做实验验证
作者的做法是强行增加U-Net里面的参数量,让它变宽,也就是增加它每个层的卷积核个数。由此,作者他们设计了一个叫wide U-Net的参考结构,先来看看UNet++的参数数量是9.04M,而U-Net是7.76M,多了差不多16%的参数,所以wide U-Net我们在设计时就让它的参数比UNet++差不多,并且还稍微多一点点,来证明效果好并不是无脑增加参数量带来的 显然,这个实验用到了控制变量法,为了证明不是参数量影响了模型的表现.所以增加U-Net参数使它变宽,即“wide” U-Net.这样这个“wide” U-Net就和UNet++的参数差不多,甚至还多了点.实验结果如下: 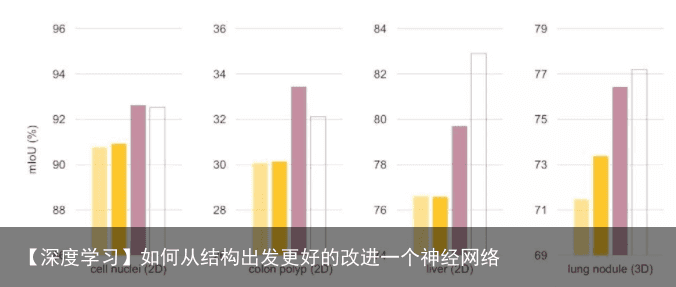 U-Net和FCN为什么成功,因为它相当于给了一个网络的框架,具体用什么特征提取器,随便。这个时候,高引就出现了,各种在encoder上的微创新络绎不绝,最直接的就是用ImageNet里面的明星结构来套嘛,前几年的BottleNeck,Residual,还有去年的DenseNet,就比谁出文章快。这一类的论文就相当于从1到10的递进,而U-Net这个低层结构的提出却是从0到1。说句题外话,像这种从1到10的论文,引用往往不会比从0到1的论文高,因为它不自觉的局限了自己的扩展空间,比如我说,我写一篇论文,说特征提取器就必须是dense block,或者必须是residual block效果好,然后名字也就是DenseUNet或者ResUNet,就这样结束了。所以关于backbone到底用什么的问题,并不是我这次要讲的重点。
U-Net和FCN为什么成功,因为它相当于给了一个网络的框架,具体用什么特征提取器,随便。这个时候,高引就出现了,各种在encoder上的微创新络绎不绝,最直接的就是用ImageNet里面的明星结构来套嘛,前几年的BottleNeck,Residual,还有去年的DenseNet,就比谁出文章快。这一类的论文就相当于从1到10的递进,而U-Net这个低层结构的提出却是从0到1。说句题外话,像这种从1到10的论文,引用往往不会比从0到1的论文高,因为它不自觉的局限了自己的扩展空间,比如我说,我写一篇论文,说特征提取器就必须是dense block,或者必须是residual block效果好,然后名字也就是DenseUNet或者ResUNet,就这样结束了。所以关于backbone到底用什么的问题,并不是我这次要讲的重点。
1.改loss,引进新的loss或针对存在的问题魔改loss。2.改架构,引入各种奇奇怪怪的模块,channel attention、spatial attention、pixel attention等等。3.改训练方法or学习方法,lr、batchsize、contrastive learning,都有很多方式可以尝试是否有更好的指标。4.改应用方向。
5 改进卷积结构5.1 转置卷积
我们将低维特征映射到高维特征的卷积操作称为转置卷积(Transposed Convolution),也称为反卷积. 和卷积网络中,卷积层的前向计算和反向传播也是一种转置关系。
对一个p 维的向量z,和大小为m的卷积核,如果希望通过卷积操作来映射到高维向量,只需要对向量z 进行两端补零p = m− 1,然后进行卷积,可以得到p + m − 1 维的向量。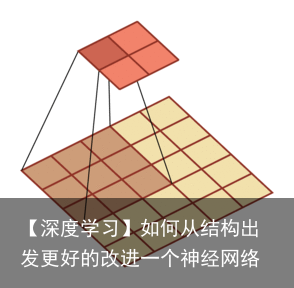
5.2 空洞卷积
对于一个卷积层,如果希望增加输出单元的感受野,一般可以通过三种方式实现: (1)增加卷积核的大小; (2)增加层数; (3)在卷积之前进行汇聚操作。 空洞卷积(Atrous Convolution),或称为膨胀卷积(Dilated Convolution),是一种不增加参数数量,同时增加输出单元感受野的一种方法。相比原来的正常convolution,dilated convolution 多了一个 hyper-parameter 称之为 dilation rate 指的是kernel的间隔数量(e.g. 正常的 convolution 是 dilatation rate 1)。 Standard Convolution with a 3 x 3 kernel (and padding) Dilated Convolution with a 3 x 3 kernel and dilation rate 2 空洞卷积通过给卷积核插入“空洞”来变相地增加其大小。如果在卷积核的每两个元素之间插入d − 1 个空洞,卷积核的有效大小为 m′ = m + (m − 1) × (d − 1),其中d 称为膨胀率(Dilation Rate)。当d = 1 时卷积核为普通的卷积核。 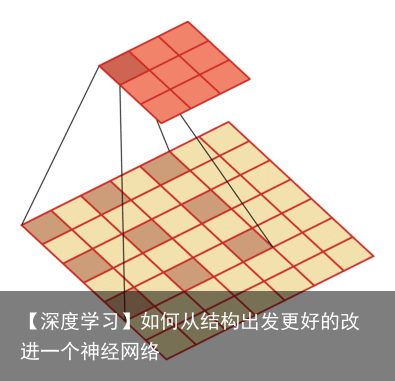
5.3 Depth-wise Convolution
最近看到了一些关于depth-wise 卷积的讨论以及争议,尤其是很多人吐槽EfficientNet利用depth-wise卷积来减少FLOPs但是计算速度却并没有相应的变快。反而拥有更多FLOPs的RegNet号称推理速度是EfficientNet的5倍。非常好奇,这里面发生了什么,为什么计算量小的网络推理速度反而慢于计算量大的网络?
5.4 MBConv
移动翻转瓶颈卷积(mobile inverted bottleneck convolution,MBConv),类似于 MobileNetV2 和 MnasNet,由深度可分离卷积Depthwise Convolution和SENet构成。
每个MBConv的网络结构如下: MBConv = 1×1升维 + Depthwise Convolution + SENet + 1×1降维 + add
5.5 高效的Unet
以EfficientNet为编码器的Unet的PyTorch 1.0实现 由于解码器路径中存在一些舍入问题(不是错误,因此这是一个功能) ?),输入形状应可被32整除。 例如224×224是适合输入图像的尺寸,但225×225则不是。 EfficientUnets 例如,说您想要一个带有2个输出通道的预训练的efficiency-b0模型:
具有EfficientNet编码器的Unet 高效网-B0 高效网-B1 EfficientNet-B2 EfficientNet-B3 EfficientNet-B4 高效网-B5 高效网-B6 高效网-B75.6 基于keras的代码实现
from keras.layers import * from keras import models from .efficientnet import * from .utils import conv_kernel_initializer __all__ = [get_efficient_unet_b0, get_efficient_unet_b1, get_efficient_unet_b2, get_efficient_unet_b3, get_efficient_unet_b4, get_efficient_unet_b5, get_efficient_unet_b6, get_efficient_unet_b7, get_blocknr_of_skip_candidates] def get_blocknr_of_skip_candidates(encoder, verbose=False): “”” Get block numbers of the blocks which will be used for concatenation in the Unet. :param encoder: the encoder :param verbose: if set to True, the shape information of all blocks will be printed in the console :return: a list of block numbers “”” shapes = [] candidates = [] mbblock_nr = 0 while True: try: mbblock = encoder.get_layer(blocks_{}_output_batch_norm.format(mbblock_nr)).output shape = int(mbblock.shape[1]), int(mbblock.shape[2]) if shape not in shapes: shapes.append(shape) candidates.append(mbblock_nr) if verbose: print(blocks_{}_output_shape: {}.format(mbblock_nr, shape)) mbblock_nr += 1 except ValueError: break return candidates def DoubleConv(filters, kernel_size, initializer=glorot_uniform): def layer(x): x = Conv2D(filters, kernel_size, padding=same, use_bias=False, kernel_initializer=initializer)(x) x = BatchNormalization()(x) x = Activation(relu)(x) x = Conv2D(filters, kernel_size, padding=same, use_bias=False, kernel_initializer=initializer)(x) x = BatchNormalization()(x) x = Activation(relu)(x) return x return layer def UpSampling2D_block(filters, kernel_size=(3, 3), upsample_rate=(2, 2), interpolation=bilinear, initializer=glorot_uniform, skip=None): def layer(input_tensor): x = UpSampling2D(size=upsample_rate, interpolation=interpolation)(input_tensor) if skip is not None: x = Concatenate()([x, skip]) x = DoubleConv(filters, kernel_size, initializer=initializer)(x) return x return layer def Conv2DTranspose_block(filters, kernel_size=(3, 3), transpose_kernel_size=(2, 2), upsample_rate=(2, 2), initializer=glorot_uniform, skip=None): def layer(input_tensor): x = Conv2DTranspose(filters, transpose_kernel_size, strides=upsample_rate, padding=same)(input_tensor) if skip is not None: x = Concatenate()([x, skip]) x = DoubleConv(filters, kernel_size, initializer=initializer)(x) return x return layer # noinspection PyTypeChecker def _get_efficient_unet(encoder, out_channels=2, block_type=upsampling, concat_input=True): MBConvBlocks = [] skip_candidates = get_blocknr_of_skip_candidates(encoder) for mbblock_nr in skip_candidates: mbblock = encoder.get_layer(blocks_{}_output_batch_norm.format(mbblock_nr)).output MBConvBlocks.append(mbblock) # delete the last block since it wont be used in the process of concatenation MBConvBlocks.pop() input_ = encoder.input head = encoder.get_layer(head_swish).output blocks = [input_] + MBConvBlocks + [head] if block_type == upsampling: UpBlock = UpSampling2D_block else: UpBlock = Conv2DTranspose_block o = blocks.pop() o = UpBlock(512, initializer=conv_kernel_initializer, skip=blocks.pop())(o) o = UpBlock(256, initializer=conv_kernel_initializer, skip=blocks.pop())(o) o = UpBlock(128, initializer=conv_kernel_initializer, skip=blocks.pop())(o) o = UpBlock(64, initializer=conv_kernel_initializer, skip=blocks.pop())(o) if concat_input: o = UpBlock(32, initializer=conv_kernel_initializer, skip=blocks.pop())(o) else: o = UpBlock(32, initializer=conv_kernel_initializer, skip=None)(o) o = Conv2D(out_channels, (1, 1), padding=same, kernel_initializer=conv_kernel_initializer)(o) model = models.Model(encoder.input, o) return model def get_efficient_unet_b0(input_shape, out_channels=2, pretrained=False, block_type=transpose, concat_input=True): “””Get a Unet model with Efficient-B0 encoder :param input_shape: shape of input (cannot have None element) :param out_channels: the number of output channels :param pretrained: True for ImageNet pretrained weights :param block_type: “upsampling” to use UpSampling layer, otherwise use Conv2DTranspose layer :param concat_input: if True, input image will be concatenated with the last conv layer :return: an EfficientUnet_B0 model “”” encoder = get_efficientnet_b0_encoder(input_shape, pretrained=pretrained) model = _get_efficient_unet(encoder, out_channels, block_type=block_type, concat_input=concat_input) return model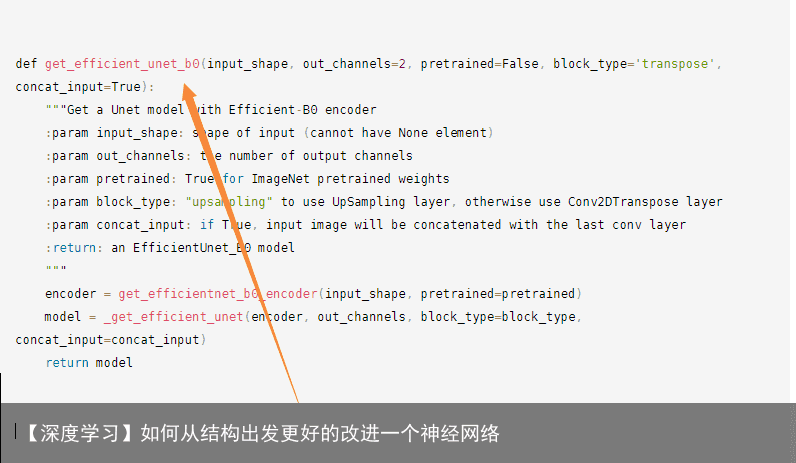 该代码的前部分为U-net架构的实现,代码主要功能是修改编码器部分。 在这个部分可以根据你自己的需求,选择不同的EfficientNet基线的改进模型。
该代码的前部分为U-net架构的实现,代码主要功能是修改编码器部分。 在这个部分可以根据你自己的需求,选择不同的EfficientNet基线的改进模型。
就到这啦~~~ 卷积层的变体和替代做一个简短的总结 MBConv 在MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications 中提出将Conv + BN + ReLU分解为DepthwiseConv + BN +ReLU + PointwiseConv + BN + ReLU.
由深度可分离卷积Depthwise Convolution和SENet构成。 Xception 使用了去掉中间激活函数的变体. 在MobileNetV2中DepthwiseConv被整合到一般的残差结构中用于取代中间的卷积操作, 并去掉了最后一个激活函数. 此外, 与原本先降维再升维相反, 新的残差结构先对输入进行升维. SE结构在MobileNetV3中被有选择性地加到DepthwiseConv这一层上.
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:【深度学习】如何从结构出发更好的改进一个神经网络 https://www.yhzz.com.cn/a/12419.html