【深度学习】如何从结构出发更好的改进一个神经网络(二)
文章目录 1 空洞卷积(dilated convolution) 2 PReLU 3 LeakyReLU可以解决神经元”死亡“问题 4 ResNet34 5 深度学习网络中backbone 6 实验 6.1 test_binary_crossentropy_bn_LeakyReLU_lr=0.01, decay=2e-5 6.2 test_binary_crossentropy_bn_PReLU_lr=0.01, decay=2e-5 6.3 test_binary_crossentropy_bn_LeakyReLU_lr=0.01, decay=2e-5 7 总结DropOut 1 空洞卷积(dilated convolution)Dilated/Atrous Convolution(中文叫做空洞卷积或者膨胀卷积) 或者是 Convolution with holes 从字面上就很好理解,是在标准的 convolution map 里注入空洞,以此来增加 reception field。相比原来的正常convolution,dilated convolution 多了一个 hyper-parameter 称之为 dilation rate 指的是kernel的间隔数量
空洞卷积存在的问题 潜在问题 1:The Gridding Effect
假设我们仅仅多次叠加 dilation rate 2 的 3 x 3 kernel 的话,则会出现这个问题: 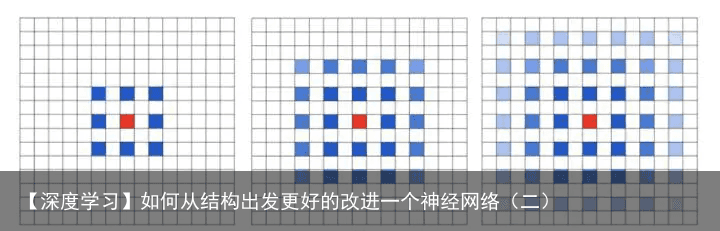 我们发现我们的 kernel 并不连续,也就是并不是所有的 pixel 都用来计算了,因此这里将信息看做 checker-board 的方式会损失信息的连续性。这对 pixel-level dense prediction 的任务来说是致命的。
我们发现我们的 kernel 并不连续,也就是并不是所有的 pixel 都用来计算了,因此这里将信息看做 checker-board 的方式会损失信息的连续性。这对 pixel-level dense prediction 的任务来说是致命的。
潜在问题 2:Long-ranged information might be not relevant.
我们从 dilated convolution 的设计背景来看就能推测出这样的设计是用来获取 long-ranged information。然而光采用大 dilation rate 的信息或许只对一些大物体分割有效果,而对小物体来说可能则有弊无利了。如何同时处理不同大小的物体的关系,则是设计好 dilated convolution 网络的关键。
2 PReLU提出 Parametric Rectified Linear Unit,即 PReLU,其对 ReLU 进行了改进推广。在几乎不增加计算量的前提下,有效的改善了模型的过拟合问题。收敛更快,误差更低。 提出一种更加稳健的初始化方式,其充分考虑到了整流单元的非线性。这种方法使得我们可以直接从零开始训练更深的网络 成就:基于 PReLU 的网络(PReLU-nets),在 ImageNet-2012 分类数据集上取得了 4.94% 的 top-5 误差。首次在计算机视觉识别任务上,超越人类水平!
 对比实验 我们使用一个 14 层的网络进行试验,网络结构参数如下表所示:
对比实验 我们使用一个 14 层的网络进行试验,网络结构参数如下表所示: 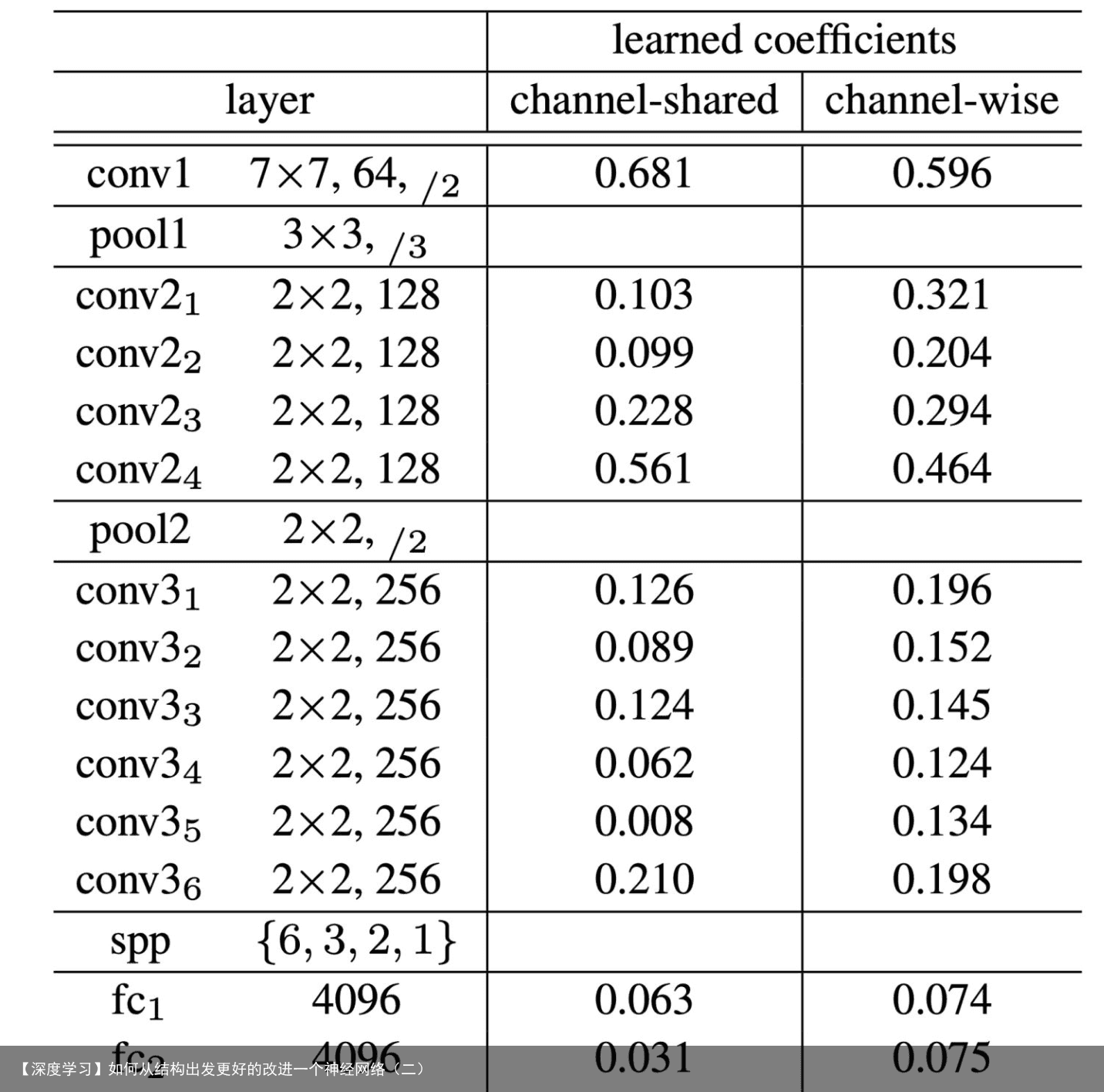 如上表所示,有两个有意思的地方:
如上表所示,有两个有意思的地方:
第一层卷积层对应的 PReLU 学习后的参数远大于 0,但之后都接近于 0.1。由于第一层卷积层作为图像边缘特征提取器,这就表明,网络同时兼顾了正负响应,有效的提取了低层次信息 对于 channel-wise 的版本,网络的深层通常参数越小。这表明,网络更倾向于在早些层保存更多信息,而在更深层更加可辨别
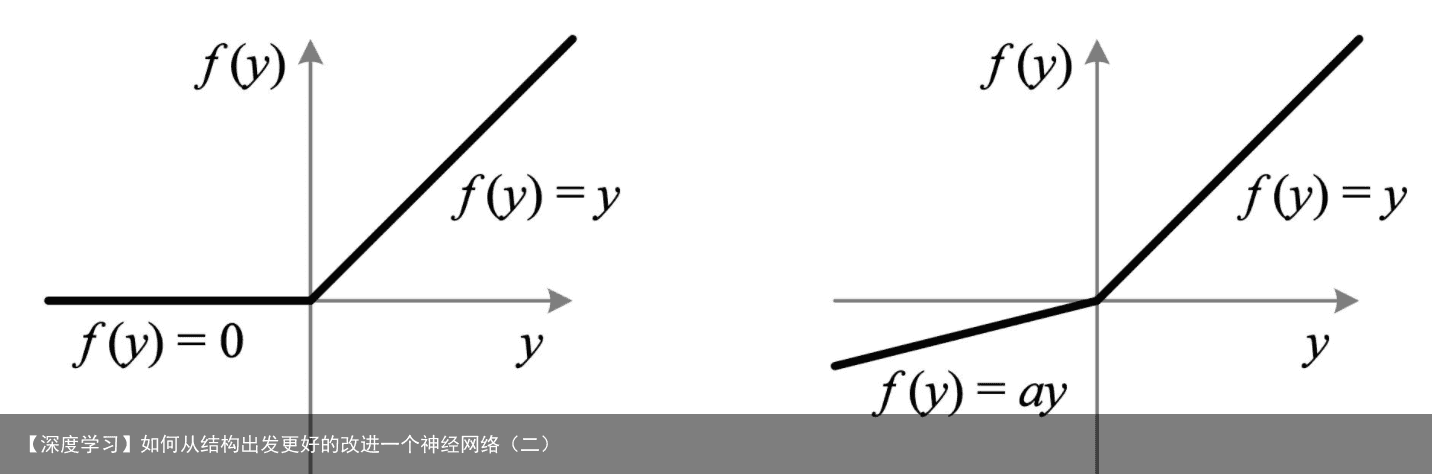
3 LeakyReLU可以解决神经元”死亡“问题实际中,LeakyReLU的α取值一般为0.01。使用LeakyReLU的好处就是:在反向传播过程中,对于LeakyReLU激活函数输入小于零的部分,也可以计算得到梯度(而不是像ReLU一样值为0),这样就避免了上述梯度方向锯齿问题。
超参数α的取值也已经被很多实验研究过,有一种取值方法是 对α随机取值,α的分布满足均值为0,标准差为1的正态分布,该方法叫做随机LeakyReLU(Randomized LeakyReLU)。原论文指出随机LeakyReLU相比LeakyReLU能得更好的结果,且给出了参数α的经验值1/5.5(好于0.01)。至于为什么随机LeakyReLU能取得更好的结果,解释之一就是随机LeakyReLU小于0部分的随机梯度,为优化方法引入了随机性,这些随机噪声可以帮助参数取值跳出局部最优和鞍点,这部分内容可能需要一整篇文章来阐述。正是由于α的取值至关重要,人们不满足与随机取样α,有论文将α作为了需要学习的参数,该激活函数为PReLU(Parametrized ReLU)。
4 ResNet34计算过程:
输入image 224x224x3
经过 7×7,conv,c_out=64,stride=2,padding=3 得到feature map:112x112x64,经过BR维度不变。
经过k=3,s=2,padding=1的pool,得到feature map:56x56x64,得到残差层的输入A
经过64x3x3x64,k=3,s=1,p=1的conv,得到 feature map:56x56x64,经过BR维度不变
经过64x3x3x64,k=3,s=1,p=1的conv,得到 feature map:56x56x64,经过B维度不变,得到残差B
A + B 得到下一层输入A1
经过64x3x3x64,k=3,s=1,p=1的conv,得到 feature map:56x56x64,经过BR维度不变
经过64x3x3x64,k=3,s=1,p=1的conv,得到 feature map:56x56x64,经过B维度不变,得到残差B1
A1 + B1 得到下一层输入A2
经过64x3x3x64,k=3,s=1,p=1的conv,得到 feature map:56x56x64,经过BR维度不变
经过64x3x3x64,k=3,s=1,p=1的conv,得到 feature map:56x56x64,经过B维度不变,得到残差B2
A2 + B2 得到下一层输入A3
经过64x3x3x128,k=3,s=2,p=1的conv,得到 feature map:28x28x128,经过BR维度不变
经过128x3x3x128,k=3,s=1,p=1的conv,得到 feature map:28x28x128,经过B维度不变,得到残差B3
用64x1x1x128,s=2的conv将A3的维度变换为2828128
A3 + B3 得到下一层输入A4
经过128x3x3x128,k=3,s=1,p=1的conv,得到 feature map:28x28x128,经过BR维度不变
经过128x3x3x128,k=3,s=1,p=1的conv,得到 feature map:28x28x128,经过B维度不变,得到残差B4
A4 + B4 得到下一层输入A5
经过128x3x3x128,k=3,s=1,p=1的conv,得到 feature map:28x28x128,经过BR维度不变
经过128x3x3x128,k=3,s=1,p=1的conv,得到 feature map:28x28x128,经过B维度不变,得到残差B5
A5 + B5 得到下一层输入A6
经过128x3x3x128,k=3,s=1,p=1的conv,得到 feature map:28x28x128,经过BR维度不变
经过128x3x3x128,k=3,s=1,p=1的conv,得到 feature map:28x28x128,经过B维度不变,得到残差B6
A6 + B6 得到下一层输入A7
经过128x3x3x256,k=3,s=2,p=1的conv,得到 feature map:14x14x256,经过BR维度不变
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过B维度不变,得到残差B7
用128x1x1x256,s=2的conv将A7的维度变换为1414256
A7 + B7 得到下一层输入A8
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过BR维度不变
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过B维度不变,得到残差B8
A8 + B8 得到下一层输入A9
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过BR维度不变
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过B维度不变,得到残差B9
A9 + B9 得到下一层输入A10
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过BR维度不变
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过B维度不变,得到残差B10
A10 + B10 得到下一层输入A11
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过BR维度不变
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过B维度不变,得到残差B11
A11 + B11 得到下一层输入A11
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过BR维度不变
经过256x3x3x256,k=3,s=1,p=1的conv,得到 feature map:14x14x256,经过B维度不变,得到残差B11
A11 + B11 得到下一层输入A12
经过256x3x3x512,k=3,s=2,p=1的conv,得到 feature map:7x7x512,经过BR维度不变
经过512x3x3x512,k=3,s=1,p=1的conv,得到 feature map:7x7x512,经过B维度不变,得到残差B12
用256x1x1x512,s=2的conv将A12的维度变换为77512
A12 + B12 得到下一层输入A13
经过256x3x3x512,k=3,s=2,p=1的conv,得到 feature map:7x7x512,经过BR维度不变
经过512x3x3x512,k=3,s=1,p=1的conv,得到 feature map:7x7x512,经过B维度不变,得到残差B13
A13 + B13 得到下一层输入A14
经过256x3x3x512,k=3,s=2,p=1的conv,得到 feature map:7x7x512,经过BR维度不变
经过512x3x3x512,k=3,s=1,p=1的conv,得到 feature map:7x7x512,经过B维度不变,得到残差B14
A14 + B14 得到下一层输入A15
经过256x3x3x512,k=3,s=2,p=1的conv,得到 feature map:7x7x512,经过BR维度不变
经过512x3x3x512,k=3,s=1,p=1的conv,得到 feature map:7x7x512,经过B维度不变,得到残差B15
A15 + B15 得到下一层输入A16
经过一个globle avg_pool将A16处理成1x1x512
经过一个512×1000的fc得到1000维的输出。
5 深度学习网络中backbonebackbone这个单词原意指的是人的脊梁骨,后来引申为支柱,核心的意思。在神经网络中,尤其是CV领域,一般先对图像进行特征提取(常见的有vggnet,resnet,谷歌的inception),这一部分是整个CV任务的根基,因为后续的下游任务都是基于提取出来的图像特征去做文章(比如分类,生成等等)。所以将这一部分网络结构称为backbone十分形象,仿佛是一个人站起来的支柱。 主干网络,用来做特征提取的网络,代表网络的一部分,一般是用于前端提取图片信息,生成特征图feature map,供后面的网络使用。
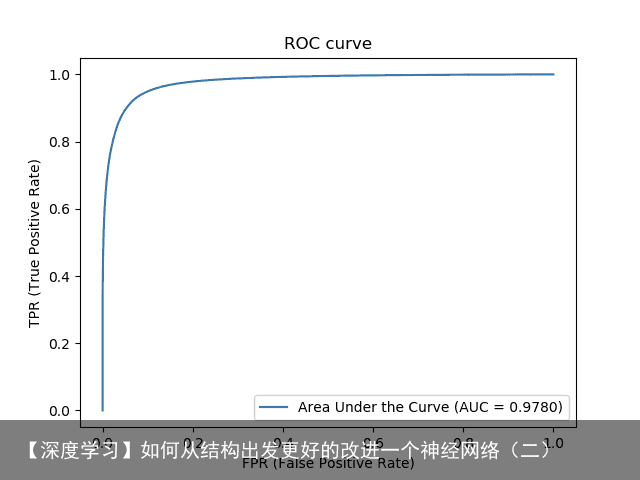
6 实验6.1 test_binary_crossentropy_bn_LeakyReLU_lr=0.01, decay=2e-5
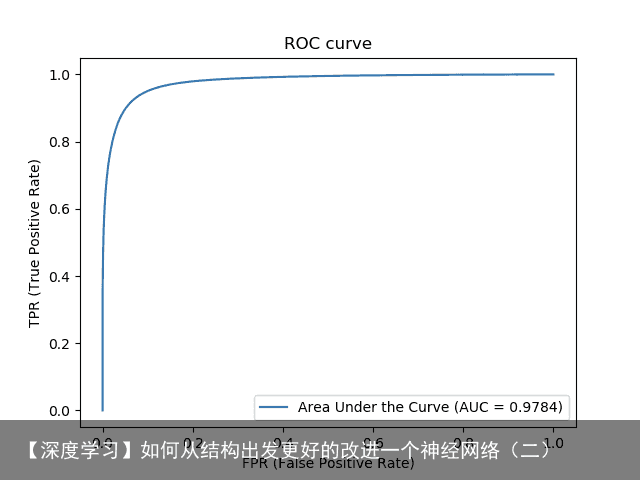 Area under the ROC curve: 0.9783655005634913 Area under Precision-Recall curve: 0.9081161109531458 Jaccard similarity score: 0.9556604981376744 F1 score (F-measure): 0.818853320153726
Area under the ROC curve: 0.9783655005634913 Area under Precision-Recall curve: 0.9081161109531458 Jaccard similarity score: 0.9556604981376744 F1 score (F-measure): 0.818853320153726
Confusion matrix:[[3882130 78364] [ 122855 454794]] ACCURACY: 0.9556604981376744 SENSITIVITY: 0.7873189428182166 SPECIFICITY: 0.9802135794171131 PRECISION: 0.8530191800554432
6.2 test_binary_crossentropy_bn_PReLU_lr=0.01, decay=2e-5
6.3 test_binary_crossentropy_bn_LeakyReLU_lr=0.01, decay=2e-5
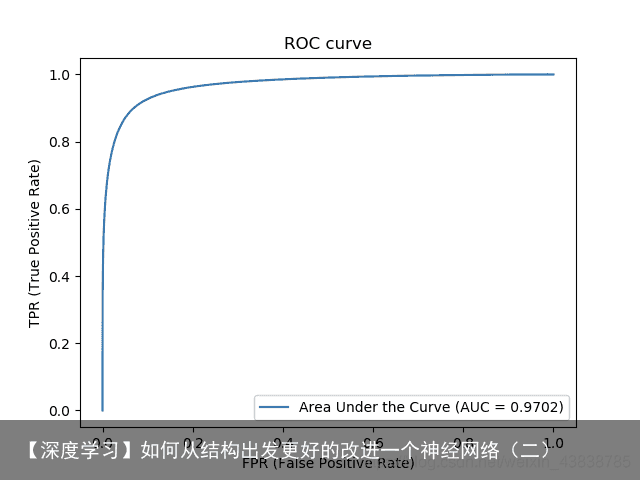 Area under the ROC curve: 0.9783655005634913 Area under Precision-Recall curve: 0.9081161109531458 Jaccard similarity score: 0.9556604981376744 F1 score (F-measure): 0.818853320153726
Area under the ROC curve: 0.9783655005634913 Area under Precision-Recall curve: 0.9081161109531458 Jaccard similarity score: 0.9556604981376744 F1 score (F-measure): 0.818853320153726
Confusion matrix:[[3882130 78364] [ 122855 454794]] ACCURACY: 0.9556604981376744 SENSITIVITY: 0.7873189428182166 SPECIFICITY: 0.9802135794171131 PRECISION: 0.8530191800554432
7 总结DropOut文章的最后说一种防止过拟合的方法。 方法步骤为:
删除隐藏层的一些神经单元
在新的神经网络上正向,反向更新
恢复最初始的神经元,重新随机选择一半删除。正反更新
重复上面的过程
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:【深度学习】如何从结构出发更好的改进一个神经网络(二) https://www.yhzz.com.cn/a/12407.html