【深度学习】医学图像分割多标签损失函数和极坐标变换
cross entropy(CE) 交叉熵是从Kullback-Leibler(KL)散度推导出来的,它是衡量两种分布之间不同的度量。对于一般的机器学习任务,数据的分布是由训练集给出的。因此最小化KL散度等价于最小化交叉熵。交叉熵被定义为:
 其中, 如果标签 𝑐 是像素 𝑖 的正确分类,则 𝑔𝑐𝑖 是二值指标; 𝑠𝑐𝑖 是对应的预测概率。
其中, 如果标签 𝑐 是像素 𝑖 的正确分类,则 𝑔𝑐𝑖 是二值指标; 𝑠𝑐𝑖 是对应的预测概率。
weighted cross entropy(WCE) 加权交叉熵是交叉熵的一般扩展形式:  其中, 𝑤𝑐 是每类分类的权重;一般情况下, 𝑤𝑐 是和类别频率呈反比的。
其中, 𝑤𝑐 是每类分类的权重;一般情况下, 𝑤𝑐 是和类别频率呈反比的。
TopK loss TopK loss损失函数旨在强迫网络在训练过程中关注硬样本。
 其中, 𝑡∈(0,1] 是一个阈值, 1{…} 是一个二元指示函数。
其中, 𝑡∈(0,1] 是一个阈值, 1{…} 是一个二元指示函数。
Focal loss Focal loss是采用标注的CE处理图像中前景和背景分布不均匀,可以减小正确分类类别的损失值。 
dice loss dice loss损失可以直接优化dice coefficient,是最常用的分割指标之一。与交叉熵不同,它不需要对不平衡分割任务重新加权。
 IoU loss IoU loss和dice loss类似,是直接优化目标类别的分割指标。
IoU loss IoU loss和dice loss类似,是直接优化目标类别的分割指标。 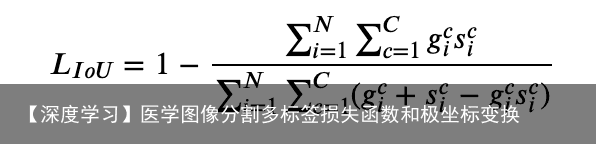 Focal Tversky loss
Focal Tversky loss 
其中, 𝛾∈[1,3]。
3 基于边界的损失函数基于边界的损失函数是一种新的损失函数类型,旨在最小化ground truth和predicated segmentation的边界距离。
boundary(BD)loss 为了以可微的形式计算两个边界间的距离 (∂𝐺,∂𝑆) ,边界损失使用边界上的损失而不是使用区域内的不平衡积分来减轻高度不平衡分割的困难。
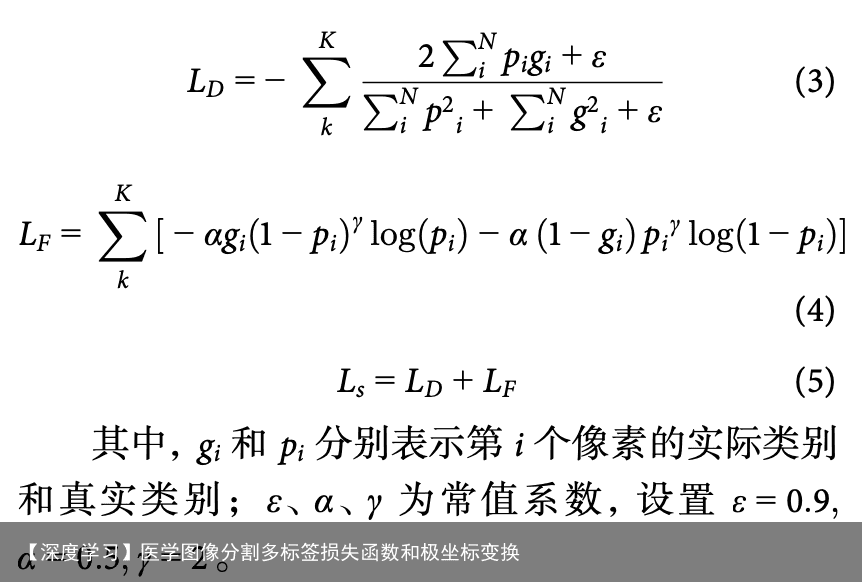
举例: 视杯、视盘联合分割任务 是一个多标签问题。现有的分割方法通常属于多 类设置,它将每个实例按照某种规则对其进行唯一 标记。而在多标签方法中,每一类都是一个独立的 二进制分类,某一实例按照某种规则对每一类进行 判断,这意味着某一实例可分别属于多个类别。这 点在视杯、视盘分割任务中十分重要,因为视杯、 视盘有严格的几何约束,视盘区域包含视杯区域, 表明属于视杯的像素也一定属于视盘。在病变的 青光眼之中,视盘区域中排除掉视杯区域的部分仅 仅只是一个很薄的圆环,这就会造成视盘与背景区 域像素面积极不平衡,而采用多标签的方法可有效 提高视盘与背景的比例,可以解决类别极不平衡的 问题。在该方法中,我们提出一个基于 DICE和 Focal-Loss的多标号损失函数,见公式(3)~ (5)。DICE 系数是一个重叠的度量,广泛用于评 估分割性能。DICE 损失函数指示前景掩码重叠 比,并且可以处理前景像素与背景的不平衡问题。 Focal-Loss 则主要为了解决数据集不平衡问题,因 为它更关注于小样本中难以分割的区域。
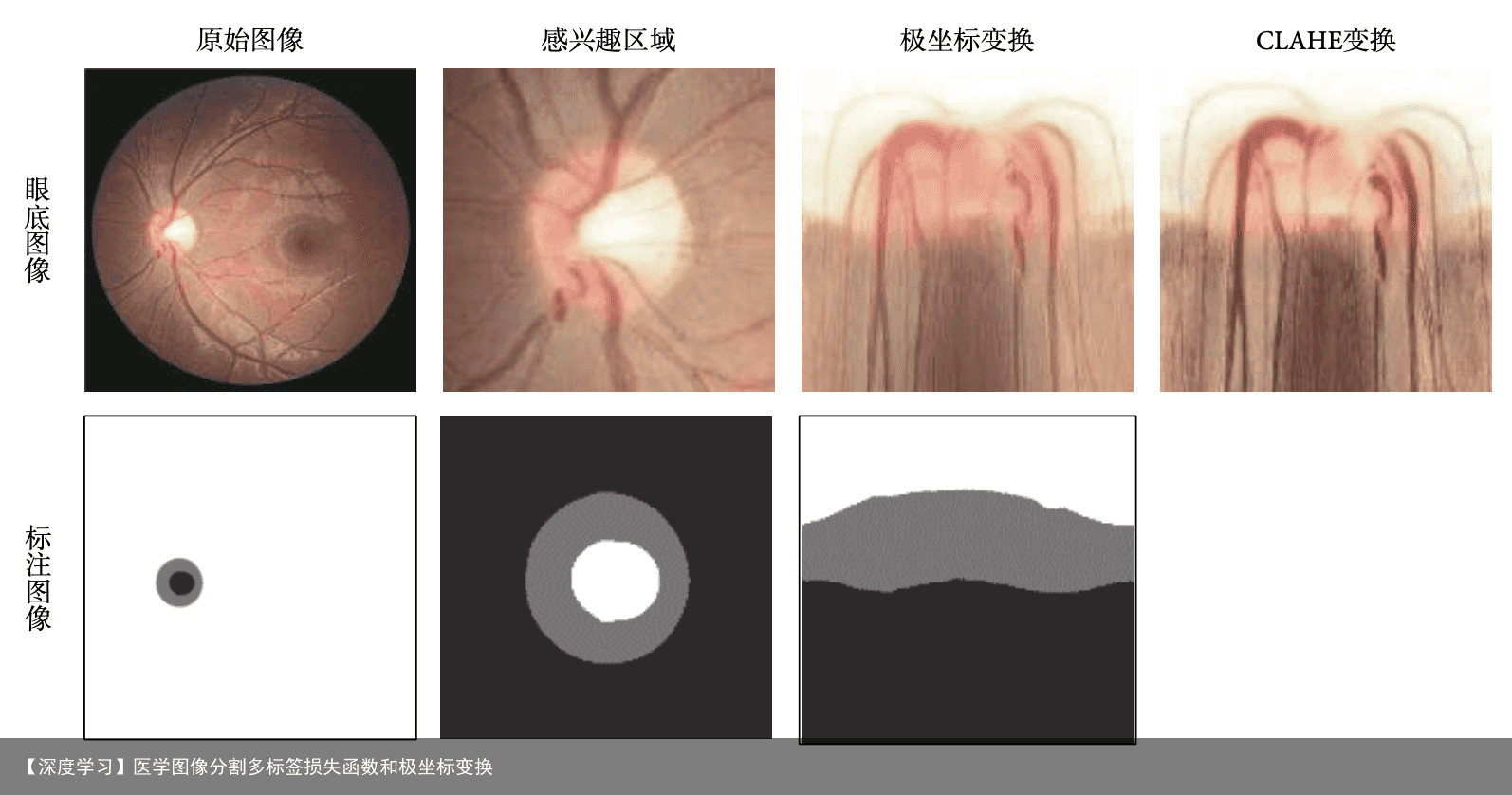
 极坐标变换的作用主要有:1 空间约束。原 始的眼底图像中,存在一个有效的几何约束是视杯 包含于视盘之中,且两者形状是近似椭圆形,这些 信息的表达和约束在网络中的实现比较困难,且各 个图像的差异性(大小和位置等)较大。但在极坐 标系统下,可以容易地将这种几何约束转换成空间 关系,即视杯、视盘和背景呈现出有序的层结构。 正因为有这种层结构,本文便将其作为先验空间约 束。具体来说,在视杯分割结果中,预测视杯像素 不可能存在于预测标注图像的下方 1/2 处,可直接 将其设置为背景部分;同理,在视盘分割的预测标 注图像的下方 1/3 处可以直接将其设置为背景部 分。 2 平衡杯盘比。在原始的眼底图像中,视杯视盘与背景的像素分布有很大的偏差。即使截取 到的感兴趣区域中,视杯区域仅占 4% 左右,这种极不平衡的结构区域很容易造成神经网络在训练过程中的偏差与过拟合,大大影响视盘、视杯分割的精度。极坐标变换是基于视盘中心的图像平坦化,可以通过插值来扩大视杯在图像中的比例。经过极坐标变换的视杯区域比率比感兴趣区域部分高23.4%,能有效提高杯盘比,平衡数据集,防止过拟合和提高分割精度。 一、平面直角坐标系与极坐标系
极坐标变换的作用主要有:1 空间约束。原 始的眼底图像中,存在一个有效的几何约束是视杯 包含于视盘之中,且两者形状是近似椭圆形,这些 信息的表达和约束在网络中的实现比较困难,且各 个图像的差异性(大小和位置等)较大。但在极坐 标系统下,可以容易地将这种几何约束转换成空间 关系,即视杯、视盘和背景呈现出有序的层结构。 正因为有这种层结构,本文便将其作为先验空间约 束。具体来说,在视杯分割结果中,预测视杯像素 不可能存在于预测标注图像的下方 1/2 处,可直接 将其设置为背景部分;同理,在视盘分割的预测标 注图像的下方 1/3 处可以直接将其设置为背景部 分。 2 平衡杯盘比。在原始的眼底图像中,视杯视盘与背景的像素分布有很大的偏差。即使截取 到的感兴趣区域中,视杯区域仅占 4% 左右,这种极不平衡的结构区域很容易造成神经网络在训练过程中的偏差与过拟合,大大影响视盘、视杯分割的精度。极坐标变换是基于视盘中心的图像平坦化,可以通过插值来扩大视杯在图像中的比例。经过极坐标变换的视杯区域比率比感兴趣区域部分高23.4%,能有效提高杯盘比,平衡数据集,防止过拟合和提高分割精度。 一、平面直角坐标系与极坐标系
1、平面直角坐标系简介
见百度百科:平面直角坐标系
2、极坐标系简介
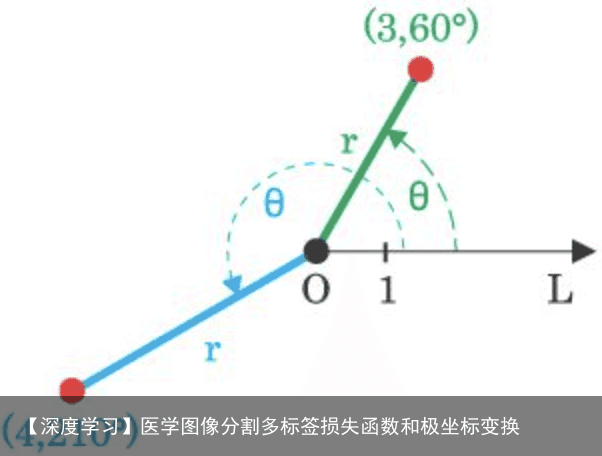
在数学中,极坐标系(英语:Polar Coordinate System)是一个二维坐标系统。该坐标系统中任意位置可由一个夹角和一段相对原点—极点的距离来表示。
 极坐标示意图
极坐标示意图
如上图:在极点为O、极轴为L的极坐标系里,点(3, 60°)的径向座标为3、角座标为60°,点(4, 210°)的径向座标为4、角座标为210°。
在两点间的关系用夹角和距离很容易表示时,极坐标系便显得尤为有用;而在平面直角坐标系中,这样的关系就只能使用三角函数来表示。对于很多类型的曲线,极坐标方程是最简单的表达形式,对于某些曲线来说,只有极坐标方程能够表示。
2.1、极坐标系中点的表示
正如所有的二维坐标系,极坐标系也有两个坐标轴:R(半径坐标)和θ(角坐标,有时也表示为φ)。R坐标表示与极点的距离,θ坐标表示按逆时针方向坐标距离为0°射线(有时也称作极轴)的角度,极轴就是在平面直角坐标系中的X轴正方向。
极坐标系中一个重要的特性是,平面直角坐标中的任意一点,可以在极坐标系中有无限种表达形式。通常来说,点(R, θ)可以任意表示为(R, θ ± n×360°)或(−R, θ ± (2n + 1)180°),这里n是任意整数。如果某一点的R坐标为0,那么无论θ取何值,该点的位置都落在了极点上。
3、二者之间的转换
3.1、由平面直角坐标系转换为极坐标系: 分类讨论: 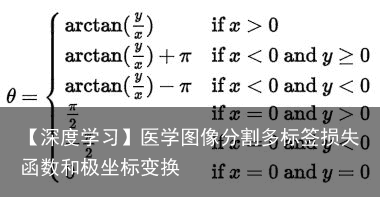 3.2、由极坐标系转换为平面直角坐标系: 二、图像中的坐标系转换
3.2、由极坐标系转换为平面直角坐标系: 二、图像中的坐标系转换
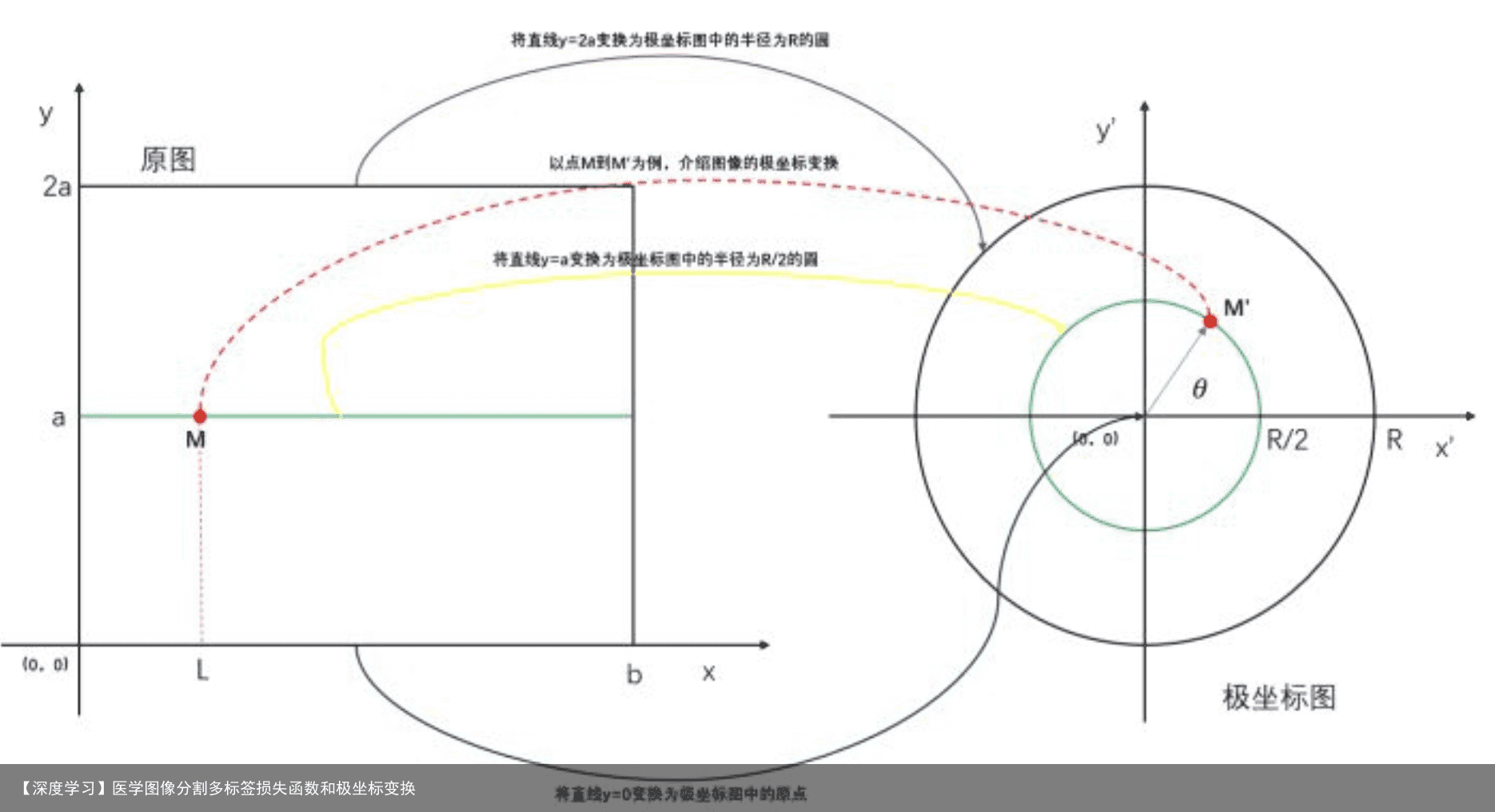
首先画出两个图像在坐标系之间进行转换的关系图:
 PPT绘图(丑爆),只做示意图使用
PPT绘图(丑爆),只做示意图使用
这里需要说明一下,虽然极坐标图中的点应该使用半径R与角度θ表示,但是由于极坐标图的展示还是在平面直角坐标系里面,所以在进行构造极坐标图的时候,其最终生成的图像仍然使用平面直角坐标系表示。
具体思路为:已知原图中每个点(M)的灰度值,通过极坐标系与平面直角坐标系的坐标转换公式,确定极坐标图中每个点(M’)处的灰度值。
通过对上图中点M的坐标变换进行讲解,如图所示:原图中M的坐标为:(L,a),在极坐标图中M的坐标为:(θ,r)。
步骤1:在极坐标图中M’的极坐标定位:
θ = 2 π M的横坐标 / 原图像的宽 = 2 π L / b;
r = 半径缩放系数 M的纵坐标 = ρ a;其中:ρ = 极坐标图的R / 原图像的高 = R / (2 * a);
步骤2:将极坐标图中的极坐标,转换为极坐标图中的平面直角坐标
x = r * cosθ;
y = r * sinθ;
步骤3:将M处的灰度值,赋给M处像素点的灰度值;
步骤4:从原图像到极坐标图像的转换中,并非所有的点均可以一一对应,这个时候就需要对没有对应原图像中像素点的极坐标图中的点(下图中的黑色细线,并未完全展示出来),进行插值操作。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:【深度学习】医学图像分割多标签损失函数和极坐标变换 https://www.yhzz.com.cn/a/12147.html