1.前言
最近做了一个电机驱动的项目,使用是DRV8350。 DRV8350,它是一个无刷直流栅极驱动器设备, 驱动三相马达的9-100V三相智能栅极驱动器
当尝试使用新设计的 PCB 系统去驱动电机时, 新系统在第一次尝试时并不总是能正常工作。
例如,电机可能无法启动,或运行不顺畅。 只有在调试过程涉及分析我们的系统, 并收集有关各个部件的信息。 就可以帮助我们找出问题根本原因。
可以确定电机系统功能是否按我们的预期运行, 保证项目的进度。 2.DRV8350 100V 三相智能栅极驱动器数据表
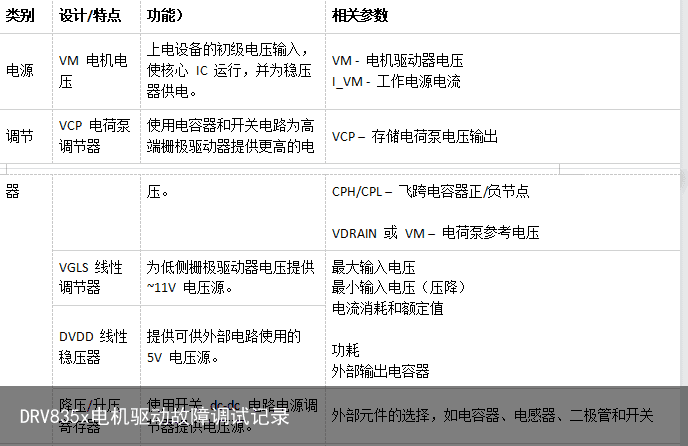

3.详细说明各种设备功能类别 3.1 电源
VM 是电机驱动 IC 的主电源, 经常偏置在电机的电压电平上。
在适当的工作条件下, 电源电压和电流消耗应在数据表限制范围内。
如果不是这种情况,则设备可能处于异常运行状态, 或者这可能表明电路板上的特定样本有一些损坏。 3.2 调节器
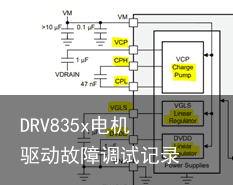
稳压器的目的是在您的系统中输出一个具有一致和特定值的电压。 有许多不同的稳压器类型,例如低压差线性稳压器 (LDO)、 电荷泵稳压器和降压/升压稳压器。
可能需要先检查这些功能, 因为这些稳压器通常对您系统中的其他电路至关重要, 例如 HS 和 LS MOSFET 的栅极驱动电压。
如果系统中的稳压器没有正确的电压输出需要检查是否: 它已被设备的保护功能或低功耗/睡眠模式功能关闭
输入电压都正确并连接到设备引脚 栅极驱动器的栅极驱动电流设置和波形按预期运行 调节器输入的外部无源元件缺失或值不正确 设备可能内部损坏,稳压器因此无法运行
3.3 故障检测
“故障”是检测到的事件,表明设备的当前操作状态存在问题。 nFault 引脚和故障寄存器应该是检查电机是否不工作的首要任务之一。 故障的类型很多,但主要是基于电压、电流和温度的故障。
许多设备将包括某种故障检测功能, 以在检测到故障时保护系统, 并关闭设备功能以防止进一步损坏。
要确定具体的故障类型和故障恢复机制的类型, 请参阅器件数据手册。 3.4 输出切换
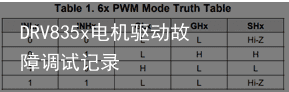
电机驱动器的核心功能是能够控制栅极驱动器并打开/关闭 MOSFET。 控制逻辑将取决于您设备的控制接口, 但通常用真值表进行解释, 以解释您将看到的任何给定输入的输出。
请注意,栅极驱动电压和电流对于 MOSFET 的正常运行很重要。
如果电机系统存在换向问题, 那么需要重新审视的一件事是真值表逻辑。 例如,它可以解释为什么您的电机启动困难或旋转方向错误。
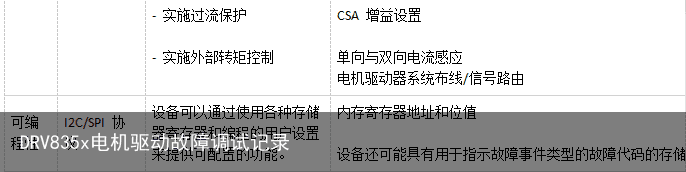
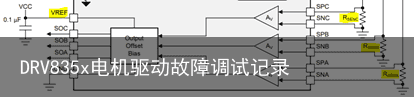
3.5 有感/无感反馈
包含霍尔效应传感器或电流感应放大器的反馈回路通常用于检测电机位置, 以帮助 MCU 更有效地驱动电机。
如果您的电机运行不正常并且您的设计包含这些反馈功能, 则重新访问数据表指南可以帮助识别 CSA 增益设置或输入信号的问题。
不正确的设置还可能导致输出 MOSFET 过流故障检测的错误警报。 此外,最好检查系统的换向算法和电机接线。
3.6 可编程性
一些电机驱动器 IC 可能有内存 (OTP/EEPROM) 来配置电机设置。 这需要使用诸如 SPI 或 I2C 之类的通信协议来读取/写入 芯片中的存储器值并对适当的设置进行编程。
所使用的设置和协议的详细信息可以在特定器件数据表中找到。 如设备寄存器映射中所述, 可由存储器配置的每个功能在特定地址处将具有以位为单位的相应值。
意外的设备行为可能是由于使用了错误的设置。
作为最佳实践,请查看数据表以了解您的 I2C 引脚(SCL、SDA)或 SPI 引脚(SDI、SDO)上 需要存在哪些上拉或下拉电阻。
以下链接中记录了有关 SPI 的其他一些一般准则: SPI 配置和使用

免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:DRV835x电机驱动故障调试记录 https://www.yhzz.com.cn/a/11713.html