1.前言
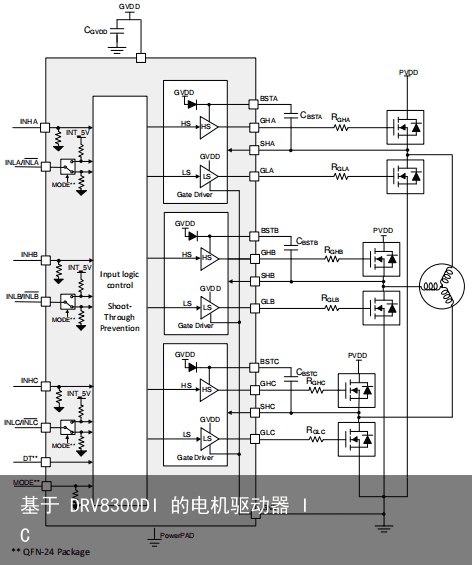
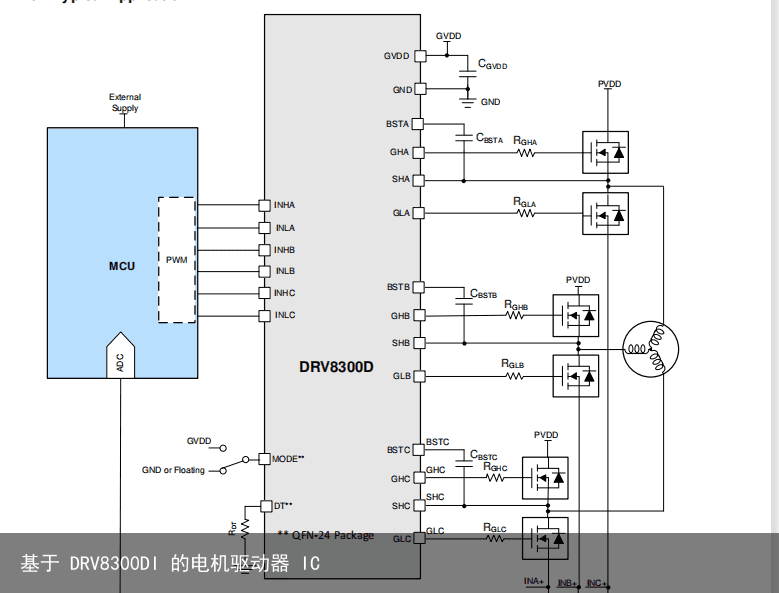
最近新项目做电机控制, 选择了DRV8300DI 的电机驱动器 IC。
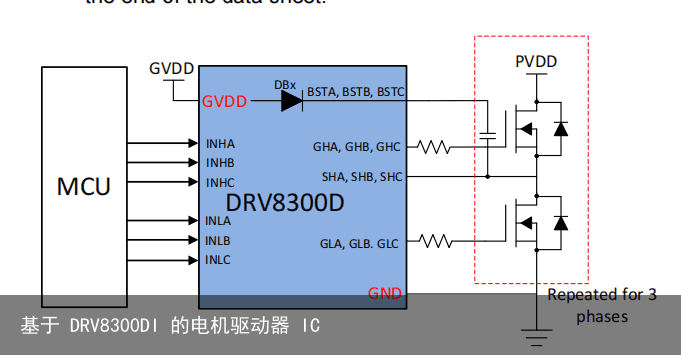
准备驱动直流无刷BLDC 电机 器件功能框图如下图所示
2.遇到的问题
(1)输入PWM频率应该是多少,应该是50Khz还是20Khz
(2)在提供 PWM 作为 DRV 输入的同时,我们是否应该为其添加任何死区时间
(3)是否有任何关于输入到 DRV 的输入 PWM 时序与电机反电动势相关的应用说明
(4)换向后看不到反电动势,可能是什么原因?
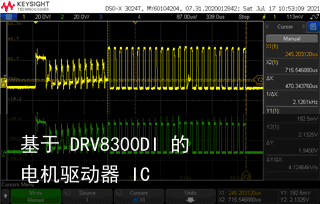
按照开关控制顺序如下表

发现问题:
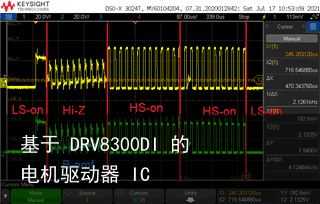
没有正确遵循梯形换向的状态表。 在每相的 HS-on 和 LS-on 之间,应该有一个 Hi-Z 状态。
上图的波形显示,在处于高侧状态的两种状态之后e, 相电压会立即进入低端导通状态, 而不会经历 Hi-Z状态(高和低 FET 均关闭)。
可能的原因是控制代码出错,检查控制时序后解决问题。
3.DRV8300DI使用心得
(1)使用 50 kHz 还是 20 kHz 的输入 PWM 频率 可以根据项目的应用需求进行选择。 该器件可以支持 0-200 kHz 的 PWM 频率
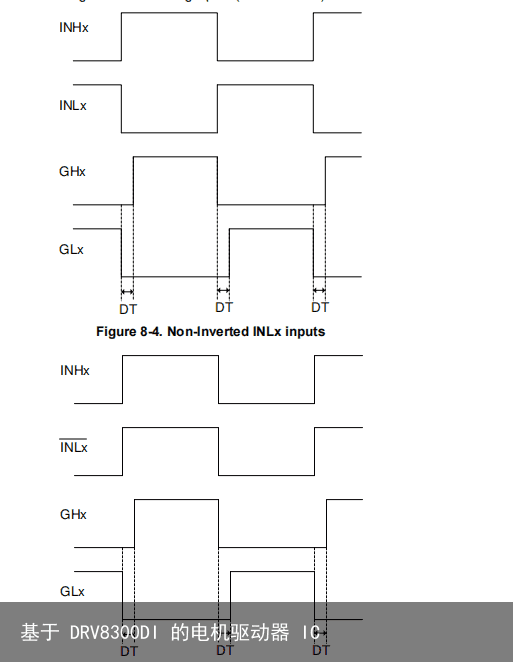
(2)该器件 (DRV8300DI) 上的死区时间固定为 200ns。 可以通过 MCU 更改此值,但是必须保证器件有一定的死区时间。
如下图:
4. PWM控制经验
PWM 的频率应在考虑所有权衡并选择考虑所有这些权衡的频率后选择。 4.1 要考虑的第一个折衷是电流纹波
当应用具有特定占空比的 PWM 信号时, 电机驱动器将在 PWM 导通期间向电机线圈提供电压, 然后在剩余时间内移除该电压,直到 PWM 信号变为再次高,过程重复。
因为电机的线圈是电感性的,电感器抵抗电流的瞬时变化, 所以当线圈上施加电压时,通过电机的电流将开始增加, 当 PWM 信号变低时, 通过电机的电流将根据电机的电感和电阻随时间逐渐减小。
如果 PWM 频率很高,则电感中的电流衰减时间不会太长, 从而产生更恒定的电流(更小的电流纹波)。
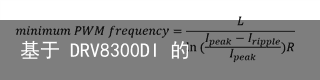
为了帮助计算设计所需的 PWM 频率,您需要知道系统中允许的最小电流纹波量是多少。 如果您希望电流在 4A 峰值 (Ipeak) 左右运行,并且您愿意容忍的最大电流纹波量为 100mA (Iripple),那么您需要选择足够高的 PWM 频率,以便电流纹波不会不超过 100mA。
使用电机的线对线电感 (L) 和电阻 (R),您可以使用以下等式进行计算: 如果您希望电流在 4A 峰值 (Ipeak) 左右运行, 并且您愿意容忍的最大电流纹波量为 100mA (Iripple), 那么您需要选择足够高的 PWM 频率, 以便电流纹波不会不超过 100mA。使用电机的线对线电感 (L) 和电阻 (R),可以使用以下公式进行计算:
如果希望电流在 4A 峰值 (Ipeak) 左右运行, 并且愿意容忍的最大电流纹波量为 100mA (Iripple), 那么需要选择足够高的 PWM 频率, 以便电流纹波不会不超过 100mA。 使用电机的线对线电感 (L) 和电阻 (R), 可以使用以下等式进行计算:
4.2 尽管较高的 PWM 频率会导致较小的电流纹波
但还需要考虑另一个折衷,因为 PWM 的频率越高, 发生的开关损耗就越多,因为 MOSFET 的开关频率更高。 这将导致更高的功率损耗。 4.3 另一件要考虑的事情是可听范围从大约 20Hz 到大约 20kHz
因此,如果 PWM 频率落在该范围内,则可能需要考虑一些噪声权衡。
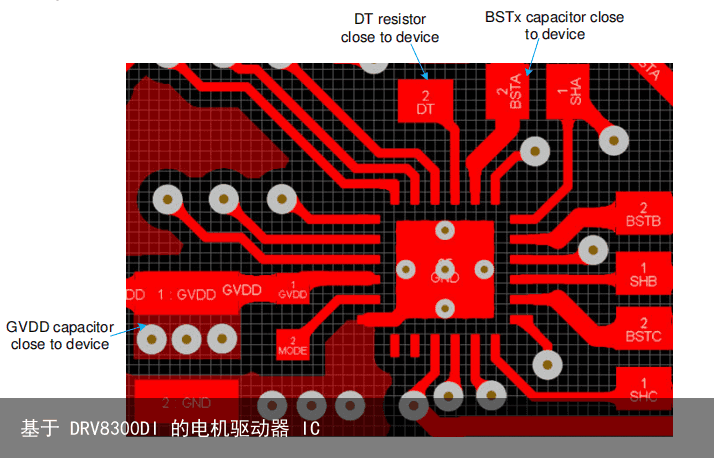
5.芯片推荐布局
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:基于 DRV8300DI 的电机驱动器 IC https://www.yhzz.com.cn/a/11691.html