1.前言
目前正在使用IWR6843AOPEVM智能毫米波传感器的评估模块
模块功能说明: (1)60GHz 至 64GHz 毫米波传感器 (2)4 根接收 (RX) 天线、3 根发射 (TX) 天线,具有 120° 方位角视野 (FoV) 和 120° 仰角 FoV (3)直接与 MMWAVEICBOOST 和 DCA1000 连接 (4)支持具有 60 个引脚的高速接口,用于主机控制接口 (5)用于监控功耗的板载功能

发现在 gtrack.h 头文件中初始化了一个结构, 即GTRACK_targetDesc 结构引用。
该结构包含一个名为 dim 的浮点变量, 它存储估计的目标尺寸的宽度、高度和深度。 我们来看一下,利用这个数据是否是目标本身的物理尺寸。
2.目标
想通过 UART 终端提取 dim 的特定值。 能否在 mss 和 dss 文件中修改一些有关更改的信息, 以便通过输出帧发送它。
如果可能的话,也想在 python 可视化工具中查看这些数据。 输出维度的代码已经存在。
但是代码的一部分被注释掉了。 在开销跟踪器演示中,值填充如下 ti\mmwave_industrial_toolbox_4_7_0\labs\common\src\dpu\trackerproc_overhead\src\trackerproc_3d.c · //targetList[n].dimX = targetDescr[n].dim[0]; //targetList[n].dimY = targetDescr[n].dim[1]; //targetList[n].dimZ = targetDescr[n].dim[2];
测量分布在 gtrack_unitUpdate() [C:\ti\mmwave_industrial_toolbox_4_7_0\labs\common\src \dpu\trackerproc_overhead\packages\ti\alg \gtrack\src\gtrack_unit_update.c] 中更新。
尺寸表示围绕质心的分布,如下所示。 /* Update measurement spread if we have 2 or more good points */ if(myGoodPointNum > 1) { for(m = 0; m < MSIZE; m++) { spread = u_max[m] – u_min[m]; /* Unbiased spread estimation */ spread = spread*(myGoodPointNum+1)/(myGoodPointNum-1); /* computed spread extimation shall be between 1x and 2x of configured limits */ if(spread > 2*inst->H_limits.array[m]) spread = 2*inst->H_limits.array[m]; if(spread < inst->H_limits.array[m]) spread = inst->H_limits.array[m]; · if(spread > inst->estSpread.array[m]) inst->estSpread.array[m] = spread; else { inst->estSpread.array[m] = (1.0f-inst->estSpreadAlpha)*inst->estSpread.array[m] + inst->estSpreadAlpha*spread; } } gtrack_calcDim(inst->estSpread.array, inst->uCenter.vector.range, inst->estDim); }
3.遇到的问题
3.1 目前正在使用 3D_People count 壁挂式演示,而不是架空演示
trackerproc_3d 是否也会被 3D_People count wall mount demo 中的 Gtrack 算法直接调用?
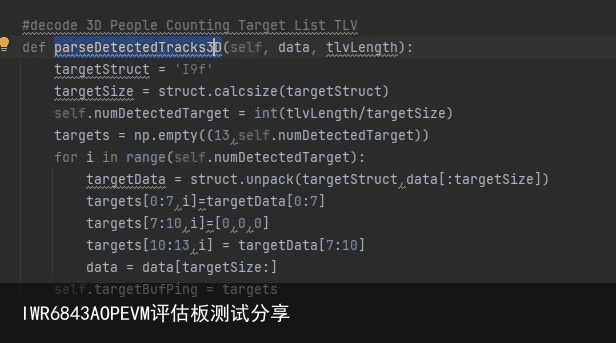
3.2 目前使用的是TI提供的python脚本oob_parser.py来解析从雷达接收到的点云数据
可以观察到 3D 轨道的解码发生在文件中的函数 parseDetectedTracks3D 中。 我是否必须在函数内部进行任何修改才能接收目标的尺寸? 我在下面附上了截图供您参考。
4.解决方案
(1)在 3D 壁挂式演示中也使用了相同的头顶跟踪器。 请参考 ti\mmwave_industrial_toolbox_4_7_0\labs\people_counting\68xx_3D_people_counting\src\68xx_3D_people_count_mss.projectspec · -I${COM_TI_MMWAVE_SDK_INSTALL_DIR}/packages/ti/alg/gtrack/lib -I${PC_PARENT_DIR}/common/src/dpu/trackerproc_overhead/lib -llibosal_xwr68xx.aer4f -llibesm_xwr68xx.aer4f
(2)对于第二个问题,答案是肯定的
TLV 长度将根据创建的数据包进行更新。 这里还有一些额外的信息来自我们的专家关于 这个昏暗的值来近似检测到的对象的有用性
这些信息可以让我们对目标尺寸有所了解, 但并不总是反映物理尺寸。
传播参数给出了特定目标的所有关联点的最大和最小位置之间的距离。 在 xy 域中,该信息通常可以反映目标大小。
但是,在某些情况下,此数据与目标大小不匹配。
例如, 当一个人在睡觉时,只有几个点会与躯干周围的目标相关联(由于呼吸), 并且点云扩散会比实际大小非常小。
此外,当使用 ISK 类型的天线方向图时, 此信息在 z 域(海拔)中的准确度较低。
不是查看单帧快照, 而是创建一个多帧窗口并在累积点云(跨多个帧)中查看此传播数据。 这种方法可以提高准确性
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:IWR6843AOPEVM评估板测试分享 https://www.yhzz.com.cn/a/11685.html