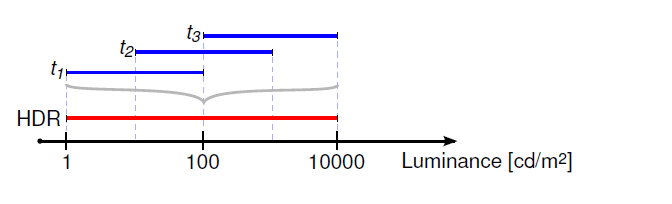
我们在上一期讲了时域多帧HDR技术–Digital Overlap. 现在在监控领域的WDR sensor主要采用这种技术,如下图,利用不同的sensor曝光(蓝色线所示)覆盖不同的动态范围,再把多曝光图像stitching起来(红色线所示),达到最大的动态范围输出。Sony的imx290,OV的ov4689都是这个类型典型sensor。
车载领域也广泛使用Temporal domain HDR技术,但是随着车载相机在ADAS与自动驾驶领域的迅速发展,对图像质量有着特别的需求,导致Temporal domain HDR技术不能满足需要。车载比较典型的两个IQ需求是不能有motion artefact 和 LED flickering。
motion artefact

LED flickering

Temporal HDR 在原理上就存在这些缺陷,所以要解决这个问题就需要使用其他的HDR体制:Spatial HDR技术是现在车载领域的主流解决方案。
比较典型的是Sony sensor(imx390/490)采用的Subpixel技术与OV sensor(ovx1a)采用的split pixel技术,他们都属于SpatialHDR技术范畴,其基本原理是一致的。
1.大小pixel的分离结构
与普通CFA的不同,大小pixel技术的sensor在相邻位置有一大一小两个pixel,他们空间上非常接近,可以认为对空间采样相同。

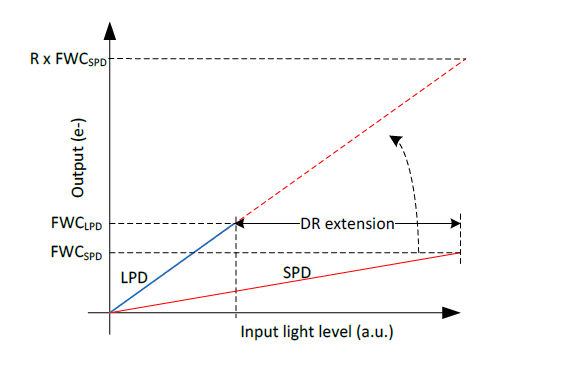
由于pixel的大小不同,物理上的sensitivity不同,FWC也不同,会产生与时域HDR一样的不同曝光效果,形成了对不同动态范围的覆盖。如下图可以看到LPD(Large Pixel Diode)与SPD(Small Pixel Diode)是如何扩展动态范围的。
2.大小分离pixel的电路设计
典型的大小分离pixel的电路如下图所示
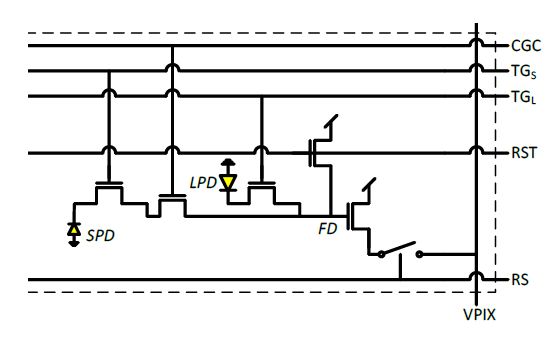
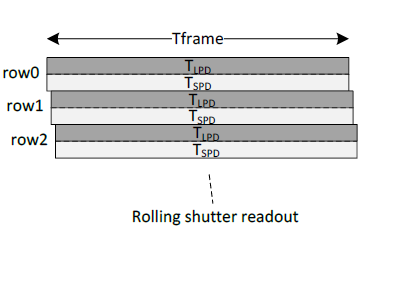
SPD和LPD分别用黄色的二极管标出。CGC(conversion gain control)与TG(transfer gate)控制了photo diode 向FD充电,当TGs使能时,FD接收SPD来的电荷,RS会使能让FD的电荷转存出来。然后当TGL使能时,FD接收LPD来的电荷,RS会再一次使能让FD的电荷转存出来。RST负责在每一次转存后把FD电容清空。这样的电路结构就实现了LPD和SPD的分别读出。这个部分的电路时钟非常快,所以可以认为大小像素是同时曝光的。后面的读出电路也会把大小像素同时读出,由下图可见,T_lpd与T_spd是同时的。
3.大小像素HDR与时域HDR在motion artefact上的比较
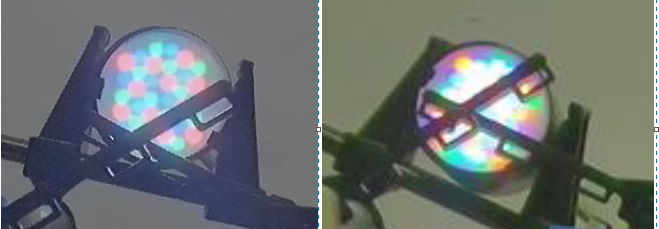
由下图可以看出基于大小像素的HDR与时域HDR在拍摄运动物体上的motion artefact比较。
左图是基于大小像素的图像,完全没有motion artefact,右图是时域HDR,可以看到明显的motion artefact。

对于这种更挑战的场景,舞厅的旋转光球,左图是大小像素HDR,右图是时域HDR,可以看到时域HDR的图像把小的运动光点都混到了一起。
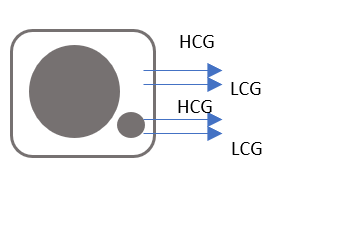
4.大小像素与Dual conversion gain的结合
单独靠大小像素只能形成两个曝光的图像,再结合之前介绍过的DCG技术,在大小pixel分别配合HCG,LCG,就可以形成4曝光。
假设单曝光输出12bit,曝光比是16,那总共的动态范围可以达到24bit输出。
5.两种场景的切换
如下图,横轴是场景的光亮度,纵轴是SNR,红色曲线是LPD像素的SNR曲线,蓝色曲线是LPD像素的SNR曲线。

SPD的饱和点更高,而LPD的低光SNR更高。这两条曲线说明了大小像素这种设计可以很灵活的适配场景的变化,当场景非常亮的情况,就用大小像素融合输出,这样可以扩大动态范围。
当场景非常暗的情况,就完全切换到LPD像素,因为它的SNR更高。
前段时间有读者在大话成像QQ交流群里讨论他们在使用大小像素sensor时出现的一些问题,并且把出现问题的图像上传到了大话成像论坛,感兴趣的朋友可以去论坛进一步阅读。
论坛地址是 www.dahuachengxiang.com
转载:全栈芯片工程师
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:HDR imaging(3)—-split/sub pixel 技术-hdr auto https://www.yhzz.com.cn/a/10902.html