SPI是Serial Peripheral Interface的简称,是由Motorola公司推出的一种高速、全双工的总线协议,可以实现一对一、一对多芯片通信。
SPI接口信号
SPI由SCLK、CS/SSEL、MOSI,MISO四根线组成,
SCLK,时钟信号,时钟频率即SPI速率,和SPI模式有关;
MOSI,主机输出,从机输入;
MISO,主机输入,从机输出;
CS/SSEL,从机设备选择,低电平有效;
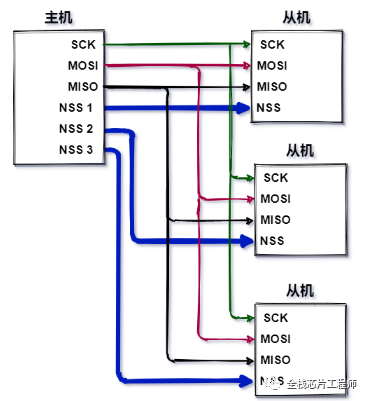
多从机模式
如果主机有多个片选CS端口,可采用下图模式,主机只能获取一个从机的MISO信号,其它从机输出信号须为高阻。
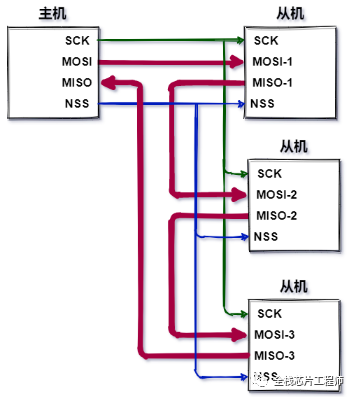
菊花链连接,节省GPIO、节省布线面积,但需要保证从机支持菊花链模式。
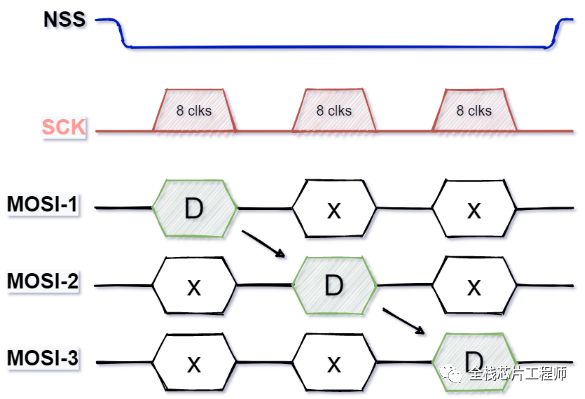
菊花链的数据传输时序:通过移位 送达数据。
QSPI协议
QSPI协议读写时序:
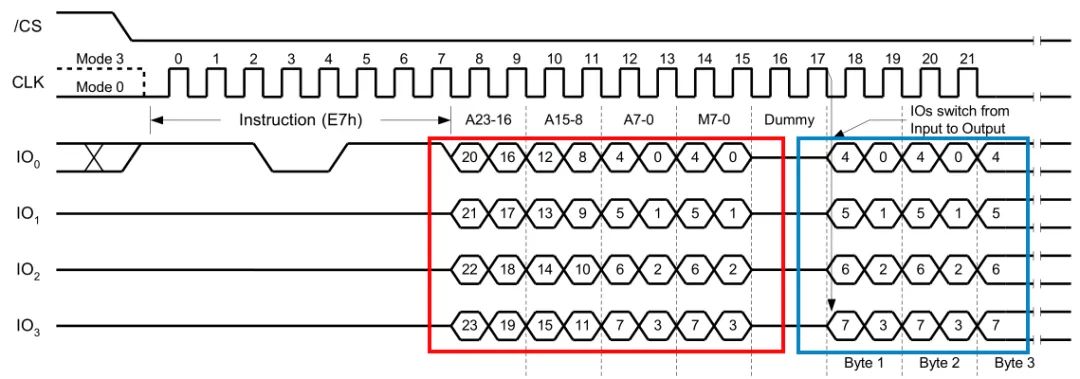
注意,很多人写公众号都没说清楚,为什么SPI能做到全双工,而有些QSPI不能呢?
因为从下面时序图可看到,发送时,待发送数据的一组8bit寄存器只在下降沿向左移位(高位先发,低位补充0即可),那么必然存在另一组8bit寄存器用以在上升沿接收数据,这样就可以构成全双工,而QSPI一般用FIFO/SRAM进行数据传输,基于成本考虑,一般只能半双工。
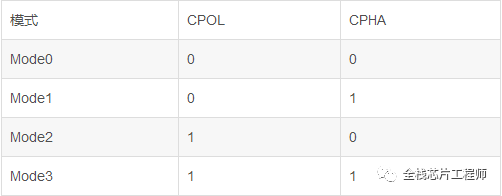
SPI工作模式根据时钟极性CPOL(Clock Polarity)、时钟相位CPHA(Clock Phase),SPI有4种模式,最广泛使用的是模式0和3:
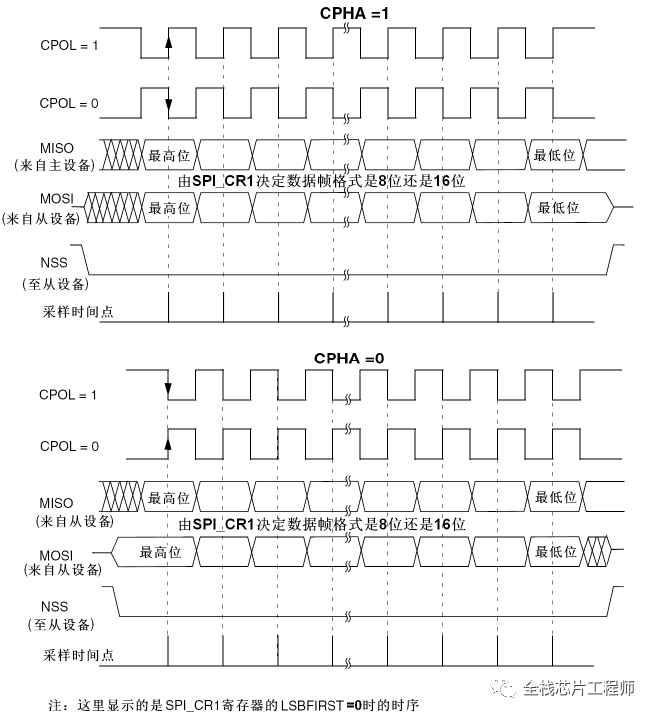
官方时序图如下:
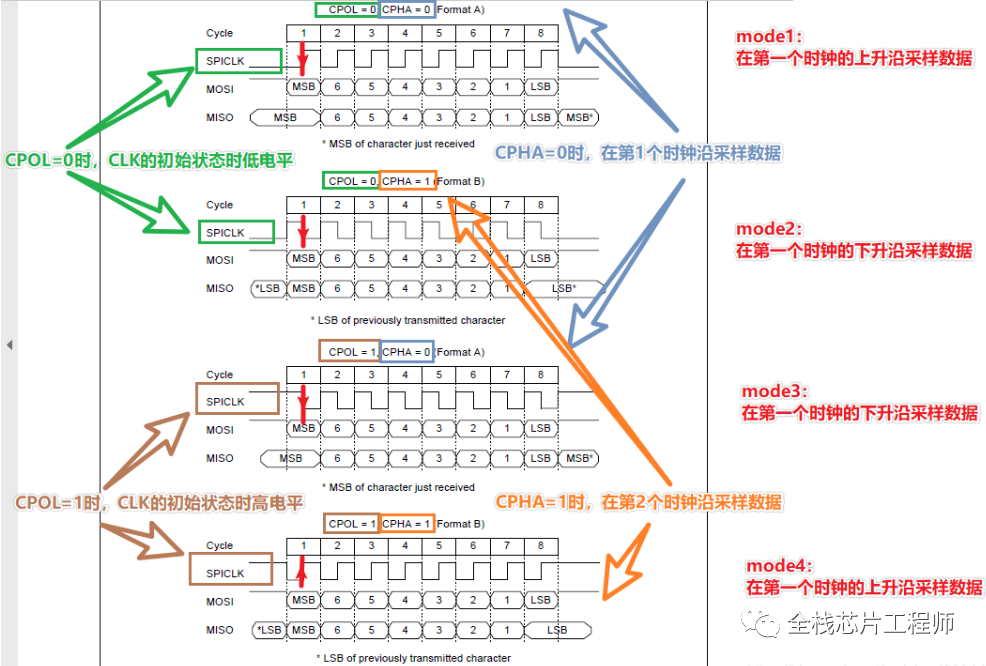
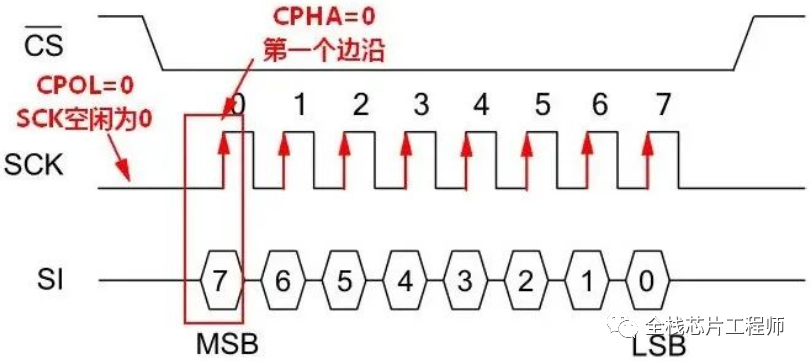
CPOL=0 CPHA=0(常用)
CPOL=0,SPICLK空闲状态为低电平;
CPHA=0,SPICLK第一个边沿(上升沿)采集数据、第二个沿输出数据;
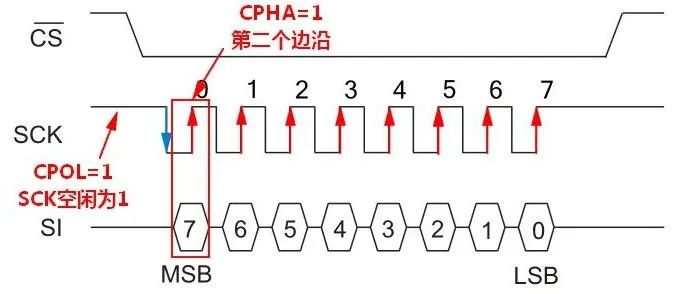
CPOL=1, CPHA=1 (常用)
CPOL=1,SPICLK空闲状态为高电平;
CPHA=1,SPICLK第二个边沿(上升沿)采集数据、第三个沿输出数据;
CPOL=0,CPHA=1 (不常用)
CPOL=0,SPICLK空闲状态为低电平;
CPHA=1,SPICLK第二个边沿(下升沿)采集数据、第三个沿输出数据;
CPOL=1,CPHA=0
(不常用)
CPOL=1,SPICLK空闲状态为高电平;
CPHA=0,SPICLK第一个边沿(下升沿)采集数据、第二个沿输出数据;
感谢阅读,别走!点赞、关注、转发后再走吧
转载:全栈芯片工程师
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:详解SPI协议-spin协议的缺点 https://www.yhzz.com.cn/a/10444.html